ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter E: Appendixes
Operation & Software Manual
Direct Drives & Systems 319
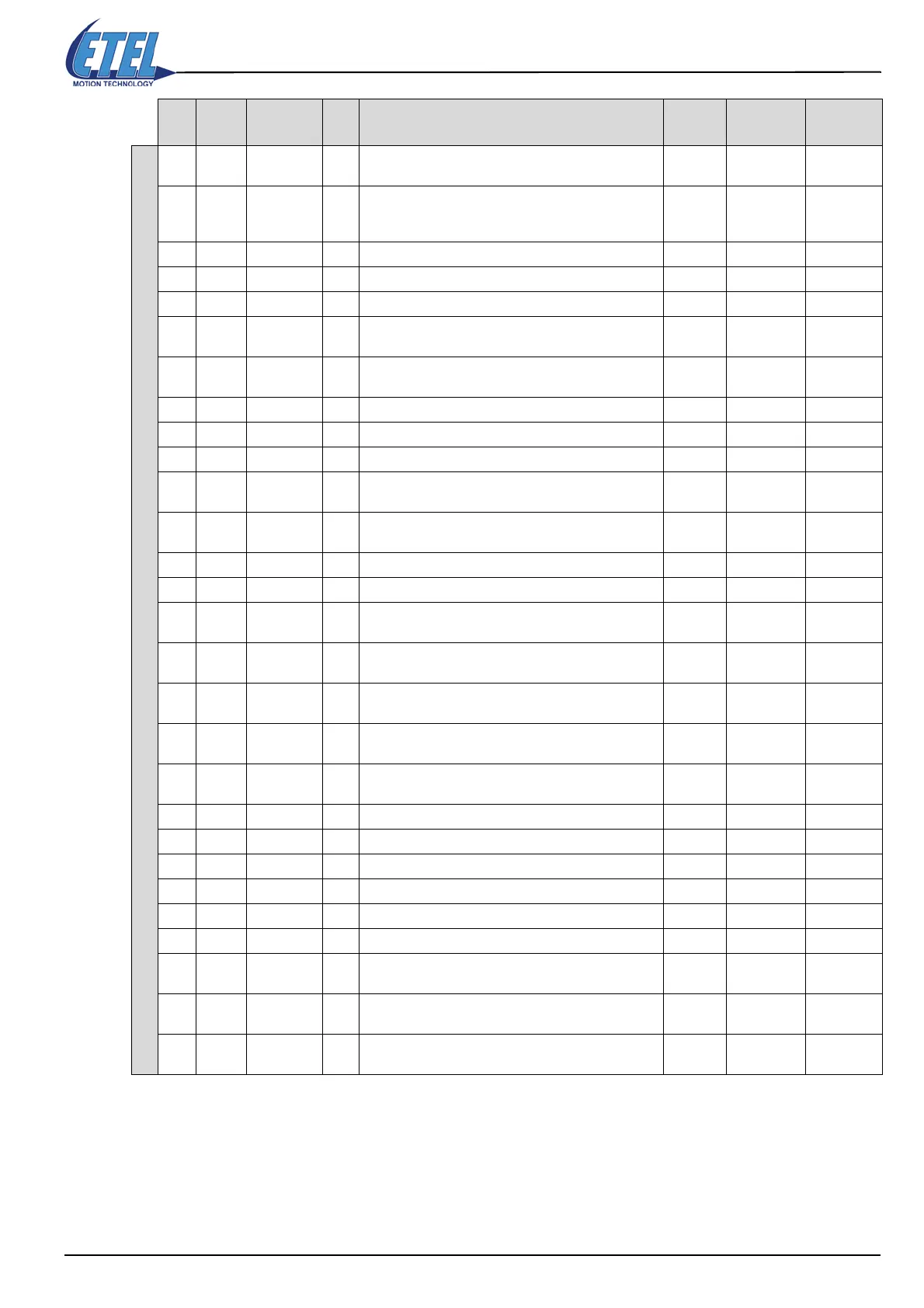
DSC2P and DSC2V monitorings
M91
DC power voltage (Vpower) [V*100]. M91/100 gives
the tension in Volt
0 0 100000
M95
Shows the strings on the display. The 16 strings of the
controller display are read using the 4 depths of M95.
Each depth shows 4 string (in ASCII)
0 0 4294967295
M96 Gives the line number being executed in the sequence 0 0 8190
M110 Gives the interpolation mode of the position controller 0 0 255
0 Interpolation mode disabled
1
Interpolation mode at every sti interrupt. Takes jerk
time (IJT) and encoder scaling/mapping into account
2
Interpolation mode on fti interrupt. Does not take jerk
time (IJT) and encoder scaling/mapping into account
M140 Fuse status 0 0 1
1 0 Fuse F3 broken (from DSC2Pxxx-xxxC-xxxx)
M145 Type of EnDat encoder 0 0 65535
M146
EnDat measuring step per turn (for rotary encoder) or
in [mm] (for linear encoder)
0 0 65535
M147
EnDat analog encoder period per turn (for rotary
encoder) or in [mm] (for linear encoder)
0 0 65535
M148 EnDat pulse number 0 0 65535
M149 EnDat turn number 0 0 65535
M171
Gives the state of the digital outputs of the controller.
Takes DOUT (K171) and K37 into account
00 15
M173
Real state of DSO-HIO analog output 1. Takes K173,
K150, K151 and K154 to K157 into account
0 -8192 8191
M174
Real state of DSO-HIO analog output 2. Takes K173,
K150, K151 and K154 to K157 into account
0 -8192 8191
M175
Real state of DSO-HIO analog output 3. Takes K173,
K150, K151 and K154 to K157 into account
0 -8192 8191
M176
Real state of DSO-HIO analog output 4. Takes K173,
K150, K151 and K154 to K157 into account
0 -8192 8191
M230 Real-time monitoring 1 slave to slave 0 0 4294967295
M231 Real-time monitoring 2 slave to slave 0 0 4294967295
M239 Encoder period 1 1 2147483647
M240 Motor type 0 0 1
M241 Encoder interpolation factor 0 0 32768
M242 Controller quartz frequency [Hz] 30000000 30000000 30000000
M243
Controller current loop time factor (cti). M243/M242 =
time in second
1250 1250 1250
M244
Controller position loop time factor (fti). M244/M242 =
time in second
1250 1250 1250
M245
Controller slow interrupt time factor (sti). M245/M242 =
time in second
5000 5000 5000
M Alias Values
Bit #
<P1>
Comment for monitorings M
and <P1> of the DSC2P and DSC2V
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>

 Loading...
Loading...
