A1400 AIR RDT 84 532119 04 - Rev. C
92
14:30
V RX TX G
J8
V RX TX G G K
E1400 RD
2
1
1
3
3
3
4
SDK EVO
7
5
6
8
V
V RX
RX
TX
TX
G
G
U/UTP CAT.5
4x2xAWG24
91
Translation of the original instructions
ENGLISH
18. SDK EVO
18.1 ASSEMBLY AND TESTING
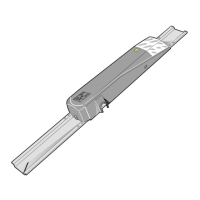
1. Disassemble parts 91 (the 2 screws must be loosened 91-
).
2. Break off the cable run insert 91-
.
3. Mark points on the wall 91-
and fasten the support with
adequate screws.
F
BEFORE CONNECTING THE DEVICE, disconnect the power supply and
the emergency battery of the automation.
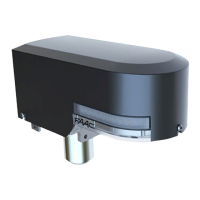
* It is possible to perform an optional connection on SDK EVO on
terminals G and K with key command. 91-
. The following
functions may be selected from SDK EVO: Block or Without operator
Password. Refer to paragraph “SDK EVO key” 92.
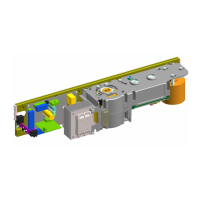
4. Connect to board E1400 RD 91-
.
5. Connection must be carried out with 4- twisted pairs cable U/UTP CAT.5
4x2xAWG24
with section 0.5mm 91-
. Maximum distance is
50 m.
6. Assemble parts (the 2 screws must be tightened 91-
).
7. fasten with screw 91-
and insert the screw cover 91-
).
18.2 SWITCHING ON AND USE
1. Power the electronic board E1400 RD.
2. The device launches the program and displays:
SDKEVO
then:
BOOTLOADER
0.0
SDKEVO
bootloader
version
3. The device is ready for use when the HOME PAGE is displayed:
4. Operation modes of the automation can be selected and set with
the buttons under the activation icons (Home Page 93).
system data and current statuses
icons in Home Page
A1400 AIR RDT THUR 20/03/14
AUTO TWODIR TOTAL

 Loading...
Loading...