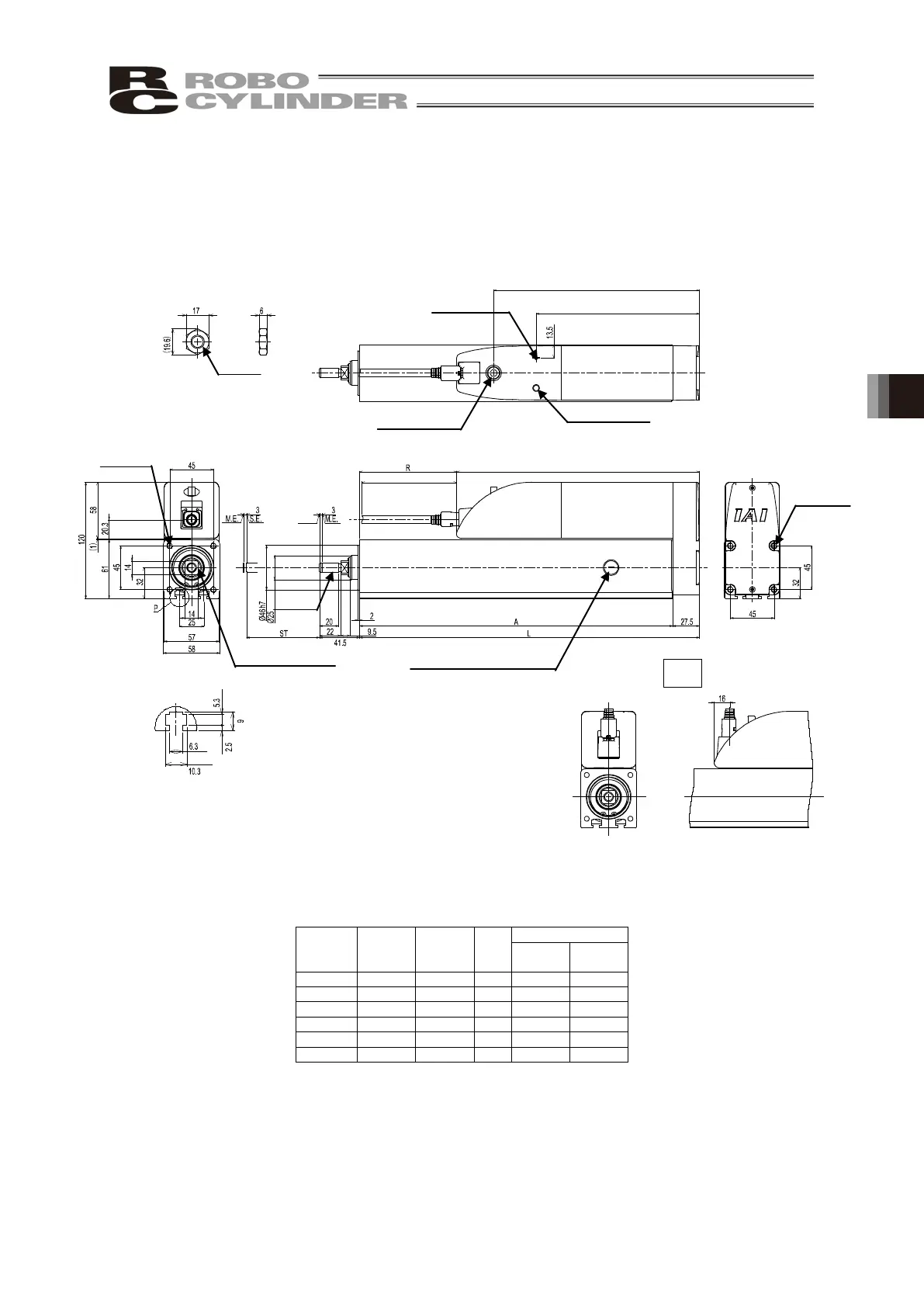
6. External Dimensions
6.15 Built-in Controller Specification RCP6S-RA6R Top Side-Mounted (Model:
MT)
ST : Stroke
M.E. : Mechanical End
S.E. : Stroke End
Stroke
L A R
(Note) When R dimension is negative, the end of the motor unit is located before the base end surface.
Cable Exit Direction (Optional)
Detailed View P
Scale 1 : 1
168.2 (The same applies to the one
with standard brake)
Maintain it more
than 100
The angle of the width
across flat is undefined.
(The same applies to the other side)
M3 Depth 4
(Ground
connection)
250.3 (The same applies to the one
with standard brake)
212 (The same applies to the
one with standard brake)

 Loading...
Loading...






