1. Specifications Check
1.2.3 Driving System • Position Detector
Type Motor Type Lead
Encoder
Ball Screw Type
Type Diameter Accuracy
RA4C
RA4R
35P
8192
Rolled
φ8mm
C10
RA6C
RA6R
42P
Rolled
φ10mm
C10
RA7C
RA7R
56P
Rolled
φ12mm
C10
RA8C
RA8R
60P
Rolled
φ16mm
C10
1.2.4 Positioning Precision
Positioning repeatability
This is an option already attached when it is shipped out from the factory. It does not include the
consideration of time-dependent change as it is used.
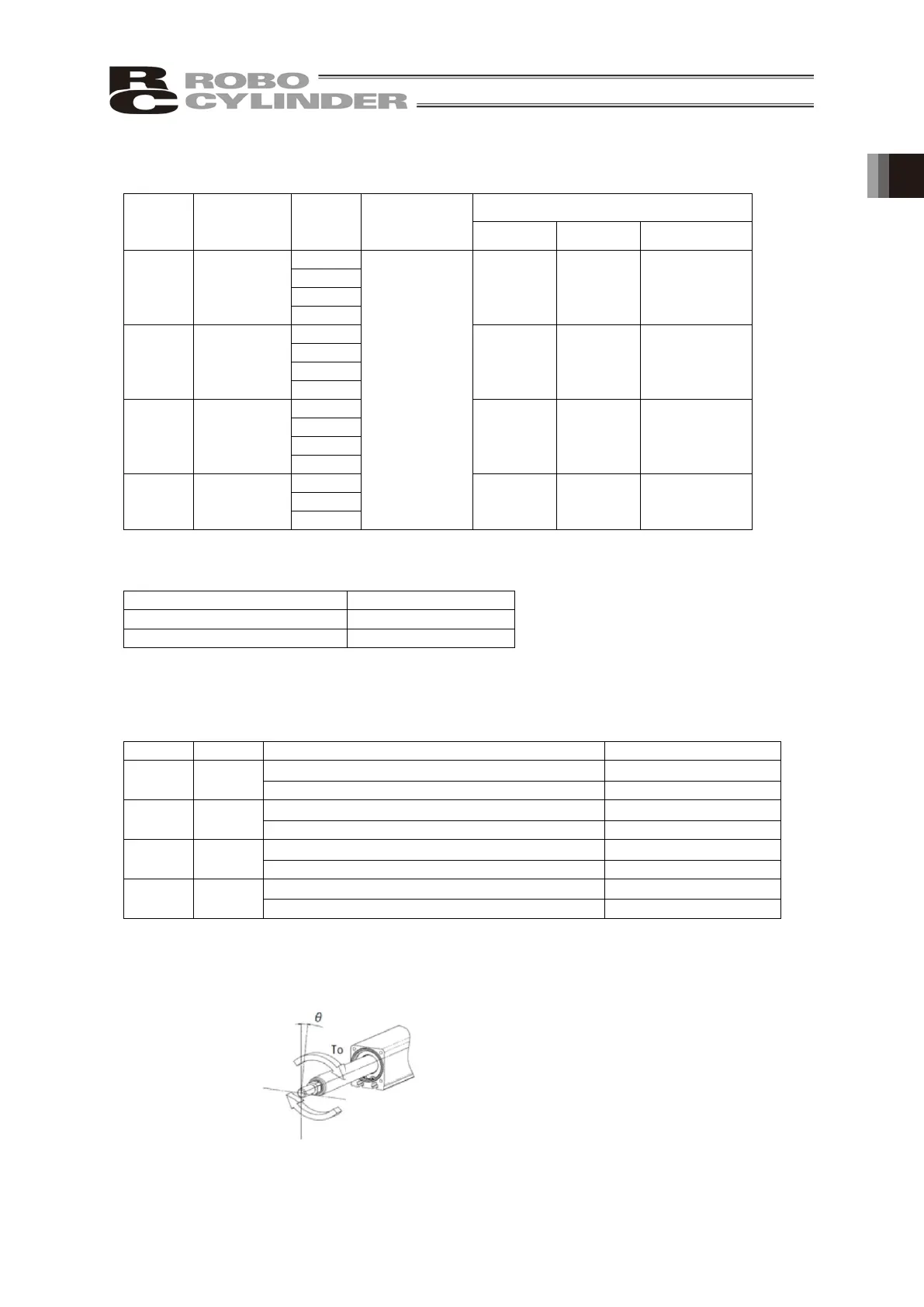
1.2.5 Rod Tip Load
RA4R
10, 16
Rod Tip Static Allowable Torque
(Note 1)
・
Rod Tip Maximum Displacement Angle
(Note 2)
Rod Tip Static Allowable Torque
(Note 1)
・
Rod Tip Maximum Displacement Angle
(Note 2)
RA7C
4, 8,
Rod Tip Static Allowable Torque
(Note 1)
・
Rod Tip Maximum Displacement Angle
(Note 2)
Rod Tip Static Allowable Torque
(Note 1)
・
Rod Tip Maximum Displacement Angle
(Note 2)
Note 1 Static allowable torque around the rod center
Note 2 These are rod tip displacement angles when they are subjected to rod tip allowable torque at
the position where the rod is retracted the most.

 Loading...
Loading...






