3. Operation
215
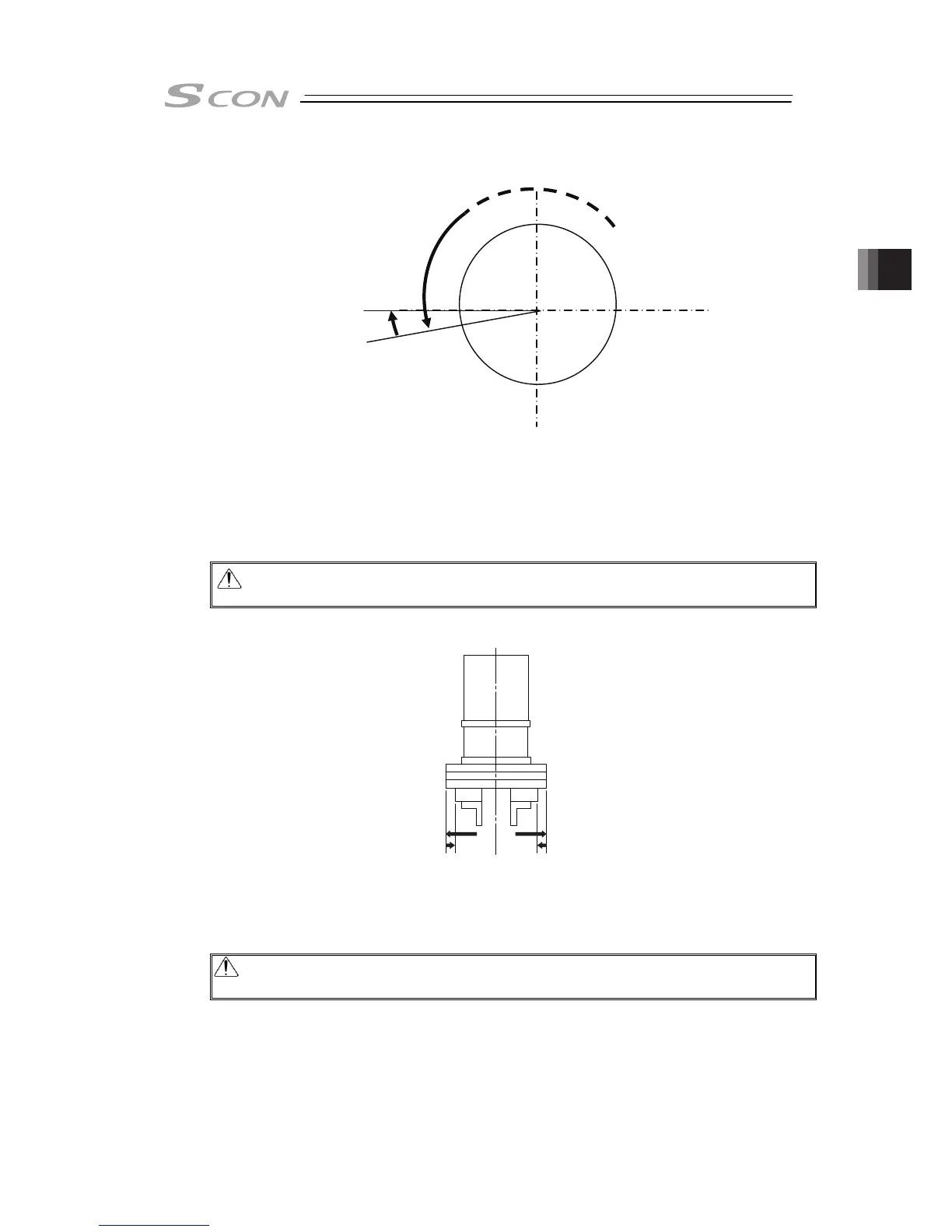
[Operation of Rotary Actuator]
1)
2)
Home = 0
°
Home sensor
1) If ST0 Signal gets turned ON when the home-return operation is incomplete, the rotary part
turns in CCW (counterclockwise) from the view of load side. The velocity is either 20deg/s
or 5deg/s. (It depends on the setting of each actuator.)
2) At the home sensor input, the actuator is turned in the reverse direction and stopped at the
home position. The rotation angle is the value set by Parameter No.22 “Home return offset
level” after the detection of phase Z.
Caution: Make sure to refer to Section 8.2 [18] when a change to Parameter No.22
“Home Return Offset Level” is required.
[Operation of actuator of gripper type]
3) If ST0 Signal gets turned ON when the home-return operation is incomplete, the actuator
moves toward the mechanical end at the home return speed (20mm/s).
4) The actuator is turned at the mechanical end and stopped at the home position. The
rotation angle is the value set by Parameter No.22 “Home return offset level” after the
detection of phase Z.
Caution: Make sure to refer to Section 8.2 [18] when a change to Parameter No.22
“Home Return Offset Level” is required.
1)
2)
3.2.6

 Loading...
Loading...





