8. Parameter
282
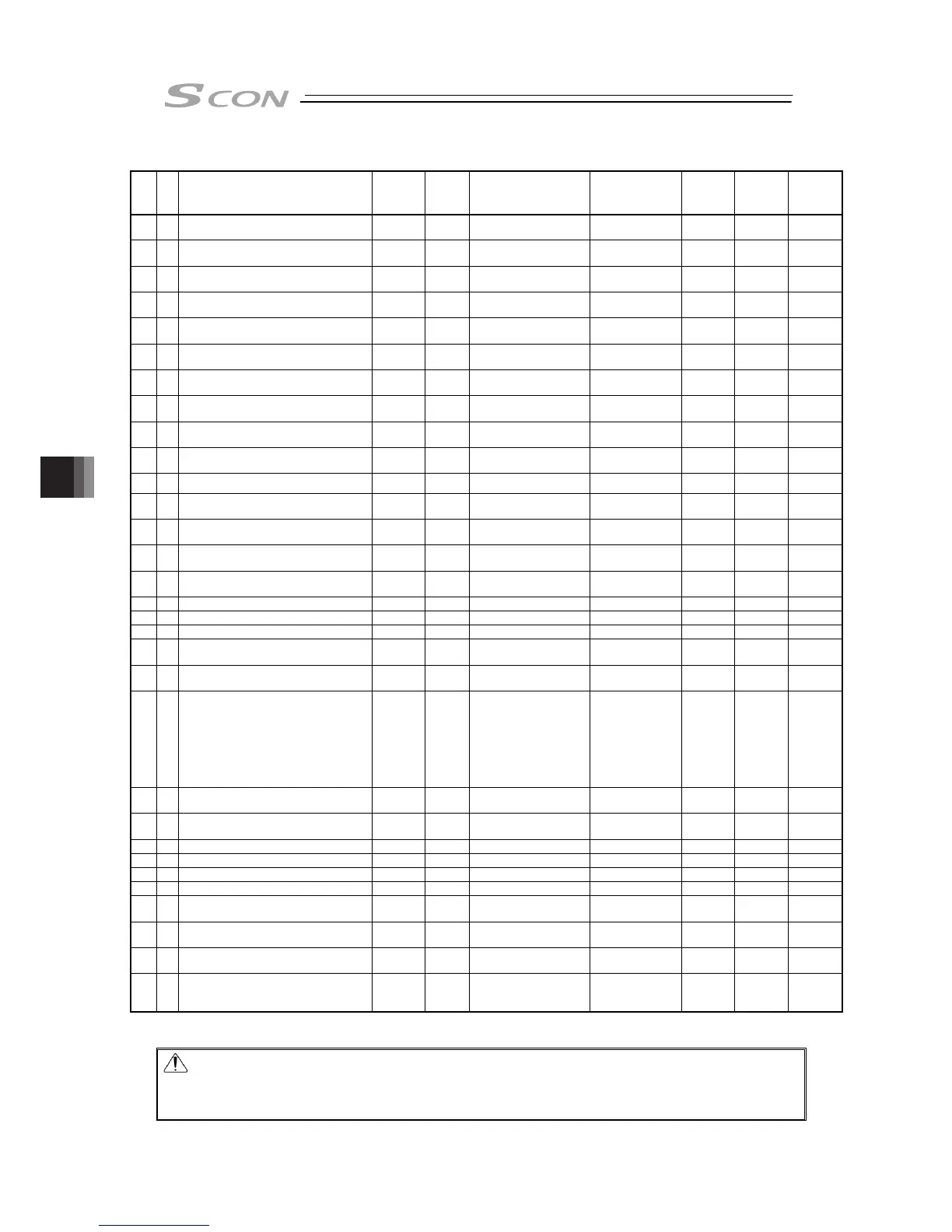
I/O Parameter List (Continued)
No.
Category
Name Symbol Unit Input Range
Default factory
setting
for
Positione
r Mode
for Pulse
Train
Mode
Relevant
sections
128 C Velocity loop proportional gain 2 VLG2 – 1 to 9999999
In accordance
with actuator
(Note2)
{
8.2 [23]
8.3
129 C Velocity loop integral gain 2 VLT2 – 1 to 9999999
In accordance
with actuator
(Note2)
{
8.2 [24]
8.3
130 C Torque filter time constant 2 TRF2 – 0 to 2500
In accordance
with actuator
(Note2)
{
8.2 [25]
8.3
131 C Current control width number 2 CLP2 – 0 to 4
In accordance
with actuator
(Note2)
{
8.2 [40]
8.3
132 C Servo gain number 3 PLG3 – 0 to 31
In accordance
with actuator
(Note2)
{
8.2 [5]
8.3
133 C Feed forward gain 3 PLF3 – 0 to 100
In accordance
with actuator
(Note2)
{
8.2 [57]
134 C Velocity loop proportional Gain 3 VLG3 – 1 to 9999999
In accordance
with actuator
(Note2)
{
8.2 [23]
8.3
135 C Velocity loop integral Gain 3 VLT3 – 1 to 9999999
In accordance
with actuator
(Note2)
{
8.2 [24]
8.3
136 C Torque filter time constant 3 TRF3 – 0 to 2500
In accordance
with actuator
(Note2)
{
8.2 [25]
8.3
137 C Current control width number 3 CLP3 – 0 to 15
In accordance
with actuator
(Note2)
{
8.2 [40]
8.3
138 C Servo gain switchover time constant GCFT ms 10 to 2000 10
{
8.2 [108]
139 A Home preset value PRST mm -9999.99 to 9999.99
In accordance
with actuator
(Note2)
{ {
8.2 [109]
140 B IP Address IPAD –
0.0.0.0 to
255.255.255.255
192.168.0.1 –
Separate
volume
141 B Subnet mask SNMK –
0.0.0.0 to
255.255.255.255
255.255.255.0 –
Separate
volume
142 B Default gateway DFGW –
0.0.0.0 to
255.255.255.255
0.0.0.0 –
Separate
volume
143 B Overload level ratio OLWL % 50 to 100 100
{ {
8.2 [113]
147 B Total Movement count threshold TMCT Times 0 to 999999999 0 (Disabled)
{
– 8.2 [114]
148 B Total Operated distance threshold ODOT m 0 to 999999999 0 (Disabled)
{ {
8.2 [115]
149 B Zone output changeover FPIO –
0: Not to change
1: To change
0
{
– 8.2 [116]
150 A Linear absolute home preset value LAPS mm -9999.99 to 9999.99
In accordance
with actuator
(Note2)
{ {
8.2 [117]
151 B Light error alarm output select FSTP – 0:
0: Battery Voltage
Drop Warning
Output
1: Output of
battery voltage
drop warning or
message-level
alarm
{ {
8.2 [118]
159 B FB half direct mode speed unit FBVS –
0: 1mm/s unit
1: 0.1mm/s unit
0
{
Separate
volume
163 C Nominal rigidity FCNS N/mm 1 to 99999
In accordance
with actuator
(Note2)
{
8.2 [120]
164 C Force control band FCBW rad/s 1 to 99 10
{
8.2 [121]
165 B Delay time after dhutdown release SDDT ms 0 to 10000 0
{ {
8.2 [122]
167 B Pulse train datum position RPOS mm 0 to 9999.99 0
{
8.2 [123]
173 B Force control transition threshold FCTH % 10 to 90 90
{
8.2 [124]
174 C Force gains 1 FRG1 - 100 to 999999
In accordance
with actuator
(Note2)
{
8.2 [125]
175 C Force gains 2 FRG2 - 100 to 999999
In accordance
with actuator
(Note2)
{
8.2 [125]
176 C Force gains 3 FRG3 - 100 to 999999
In accordance
with actuator
(Note2)
{
8.2 [125]
184 C Regenerative control selection RDSL -
1: ~750W
2: 3000W~
3: Forbidden setting
In accordance
with actuator
(Note2)
{ {
8.2 [126]
Note 2: The setting values vary in accordance with the specification of the actuator. At shipment, the
parameters are set in accordance with the specification.
Caution: When the controller is operated via serial communication, always set the controller in
“Positioner Mode” (Piano Switch 1: OFF).
If it happens to be in the “pulse train mode” by mistake, the controller may operate erratically because
it is operated according to the “pulse train mode” parameters.

 Loading...
Loading...





