Goodrive300-01A-RT series integrated machine Function description
-84-
The derivative time Td is generally set to 0.
If you need to set Td to another value, set in the same way with P and Ti, namely set Td to 30% of the
value when there is no oscillation.
d. Empty system load, perform load-carrying joint debugging, and then fine-tune PID parameter until
fulfilling the requirement.
5.3.2 PID adjusting methods
After setting the parameters controlled by PID, you can adjust these parameters by the following
means.
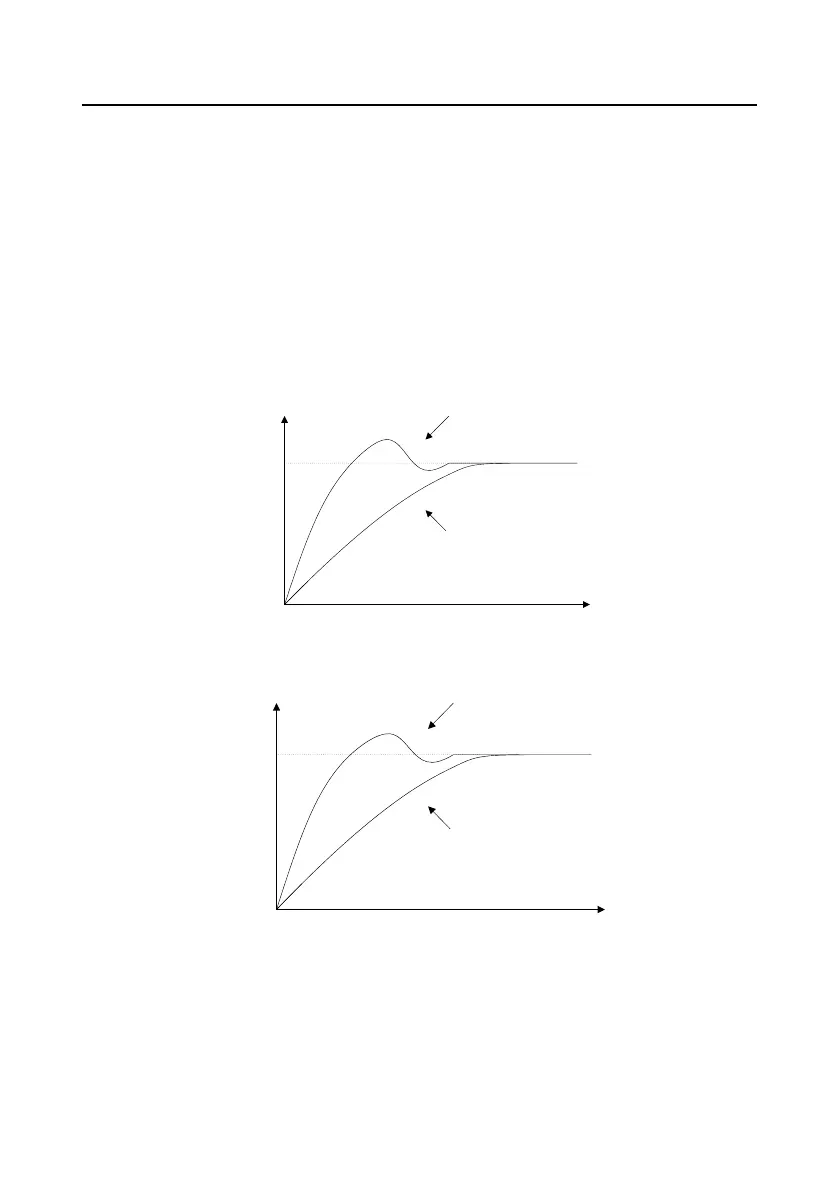
Control overshoot: When overshoot occurred, shorten the derivative time (Td) and prolong integral
time (Ti).
Before adjustment
After adjustment
Response
Time t
Stabilize the feedback value as fast as possible: When overshoot occurred, shorten integral time
(Ti) and prolong derivative time (Td) to stabilize control as fast as possible.
Before adjustment
After adjustment
Response
Time t
Control long-term vibration: If the cycle of periodic vibration is longer than the set value of integral
time (Ti), it indicates the integral action is too strong, prolong the integral time (Ti) to control vibration.
 Loading...
Loading...








