5.4 Parameter description
69
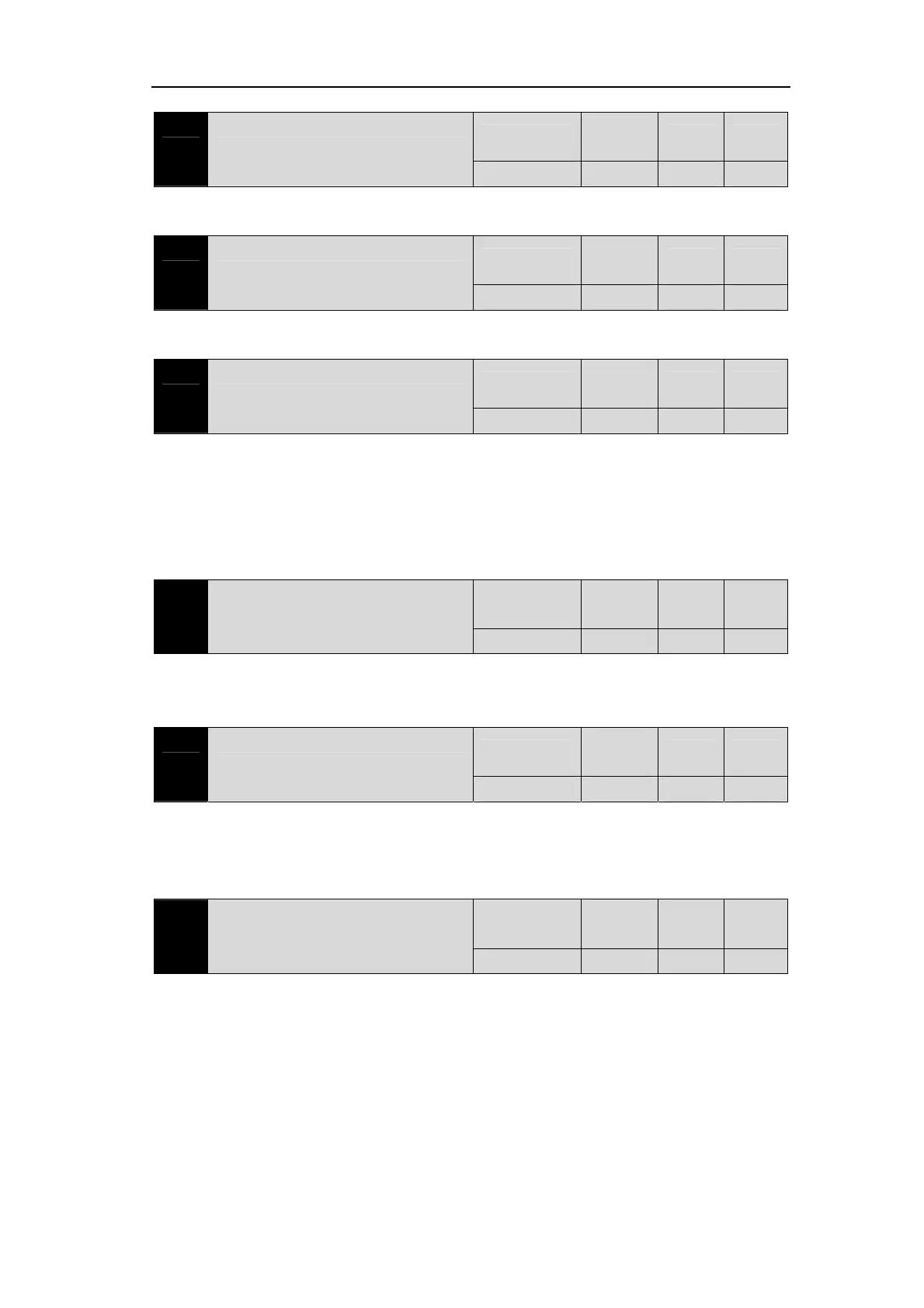
P013 Second position loop gain
Range
Default
value
Unit Usage
1~1000 80 1/s ALL
Refer to parameter P009 to enable the gain switch function before setting it.
P017 Load inertia ratio
Range
Default
value
Unit Usage
0.0~200.0 1.0 times P,S
The load inertia ratio is that the inertia of mechanical load (refers to servomotor shaft)
divides by the rotor inertia of the servomotor.
P018 Speed loop PDFF control coefficient
Range
Default
value
Unit Usage
0~100 100 % P,S
The PDFF coefficient of the speed regulator can be selected as the speed controller
structure. 0 is the IP regulator, 100 is the PI regulator, and 1 ~ 99 is the PDFF regulator.
If the parameter value is too large, the system has a high frequency response; if the
parameter value is too small, the system has a high stiffness (deviation resistance ability);
if the parameter value is medium, both the frequency response and the stiffness are
considered.
P019 Speed detection filter time constant
Range
Default
value
Unit Usage
0.01~50.00 2.00 ms P,S
The larger the parameter value, the smoother the detection, the smaller the parameter
value, the faster the detection response, too small may lead to noise; Too large can cause
oscillations.
P021 Position loop feed forward gain
Range
Default
value
Unit Usage
0~100 0 % P
Feed-forward can reduce the position tracking error in position control. When set to 100,
the position tracking error is always 0 at any frequency of instruction pulse.
When the parameter value increases, the position control response will be improved. If
the parameter value is too large, the system will be unstable and easy to oscillate.
P022
Position loop feedforward filter time
constant
Range
Default
value
Unit Usage
0.20~50.00 1.00 ms P
The function of filtering the position loop feedforward is to increase the stability of
feedforward control.