Chapter 5 Parameters
70
P025 Speed command source
Range
Default
value
Unit Usage
0~5 0 S
When speed control, set the source of the speed instruction. Parameter meaning:
0, 1, 2: Reserved
3: JOG speed command, JOG (JOG) operation, need to set.
4: Keyboard speed command, keyboard speed regulation (SR) operation,need to set.
5: Demonstrate speed command, speed control demonstration, need to be set, the speed
command will automatically change.
P040
Position instruction exponential
smoothing filtering time
Range
Default
value
Unit Usage
0~1000 0 ms P
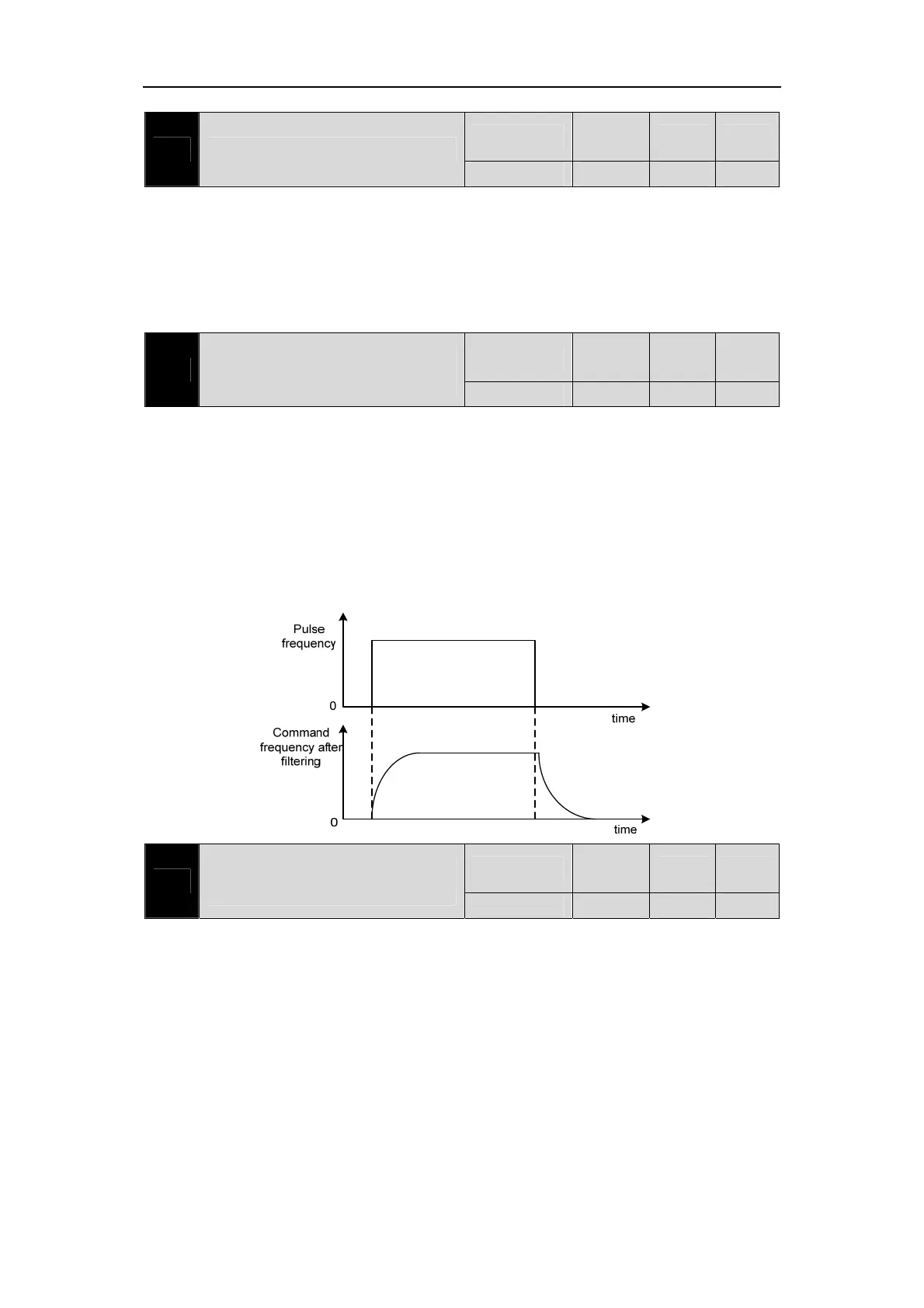
The command pulse is smoothed and has exponential acceleration and deceleration. The
filter will not lose the input pulse, but will show the instruction delay phenomenon, when
set to 0, the filter is not effective.
This filter is used for:
1. The upper controller has no acceleration and deceleration function;
2. The electronic gear is large (N/M>10);
3. Low instruction frequency;
4. Stepping and jumping and unstable phenomenon occur when the motor is running.
P041
Linear smoothing filtering time for
position instruction
Range
Default
value
Unit Usage
0~256 0 ms P
The command pulse is smoothed and has linear acceleration and deceleration. The filter
will not lose the input pulse, but will show the instruction delay phenomenon, when set to
0, the filter is not effective. The parameter value represents the time to rise from 0
frequency to 100 % of the position instruction frequency.
This filter is used for:
1. The upper controller has no acceleration and deceleration function;