5.4 Parameter description
71
2. The electronic gear is large (N/M>10);
3. Low instruction frequency;
4. Stepping and jumping and unstable phenomenon occur when the motor is running.
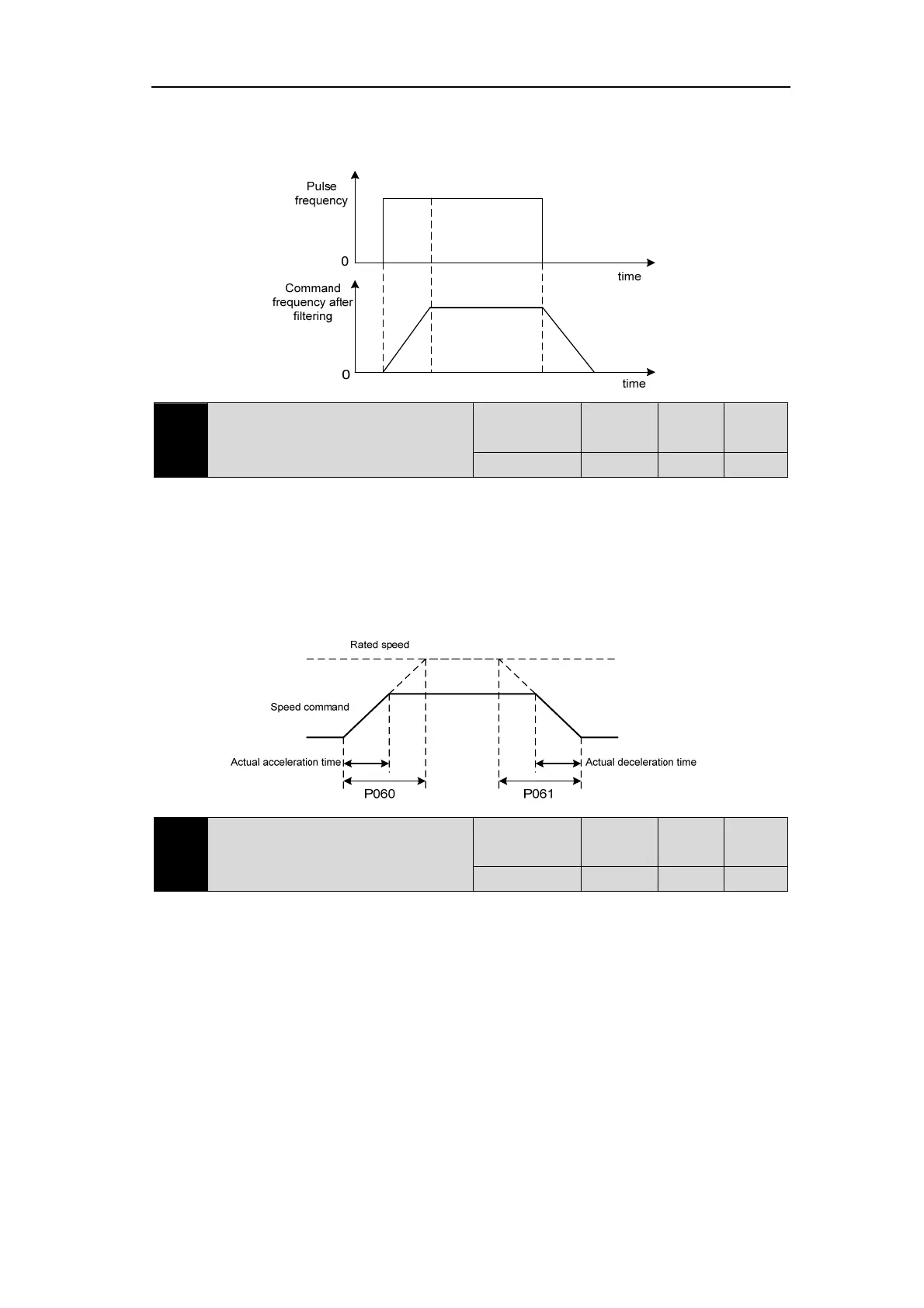
P060 Speed command acceleration time
Range
Default
value
Unit Usage
0~30000 0 ms S
Set the acceleration time of the motor from zero speed to the rated speed.
If the command speed is lower than the rated speed, the required acceleration time is
correspondingly shortened.
For speed control mode only, not position control mode.
If the driver and the upper device constitute position control, this parameter should be set
to 0, otherwise the position control performance will be affected.
P061 Speed command deceleration time
Range
Default
value
Unit Usage
0~30000 0 ms S
Sets the motor deceleration time from rated speed to zero speed.
If the command speed is lower than the rated speed, the required deceleration time is
correspondingly shortened.
For speed control mode only, not position control mode.
If the driver is used in combination with an external position ring, this parameter should
be set to 0, otherwise position control performance will be affected.