10. Safety-related functions and interfaces
MiR600 User Guide (en) 08/2021 - v.1.0 ©Copyright 2021: Mobile Industrial Robots A/S. 105
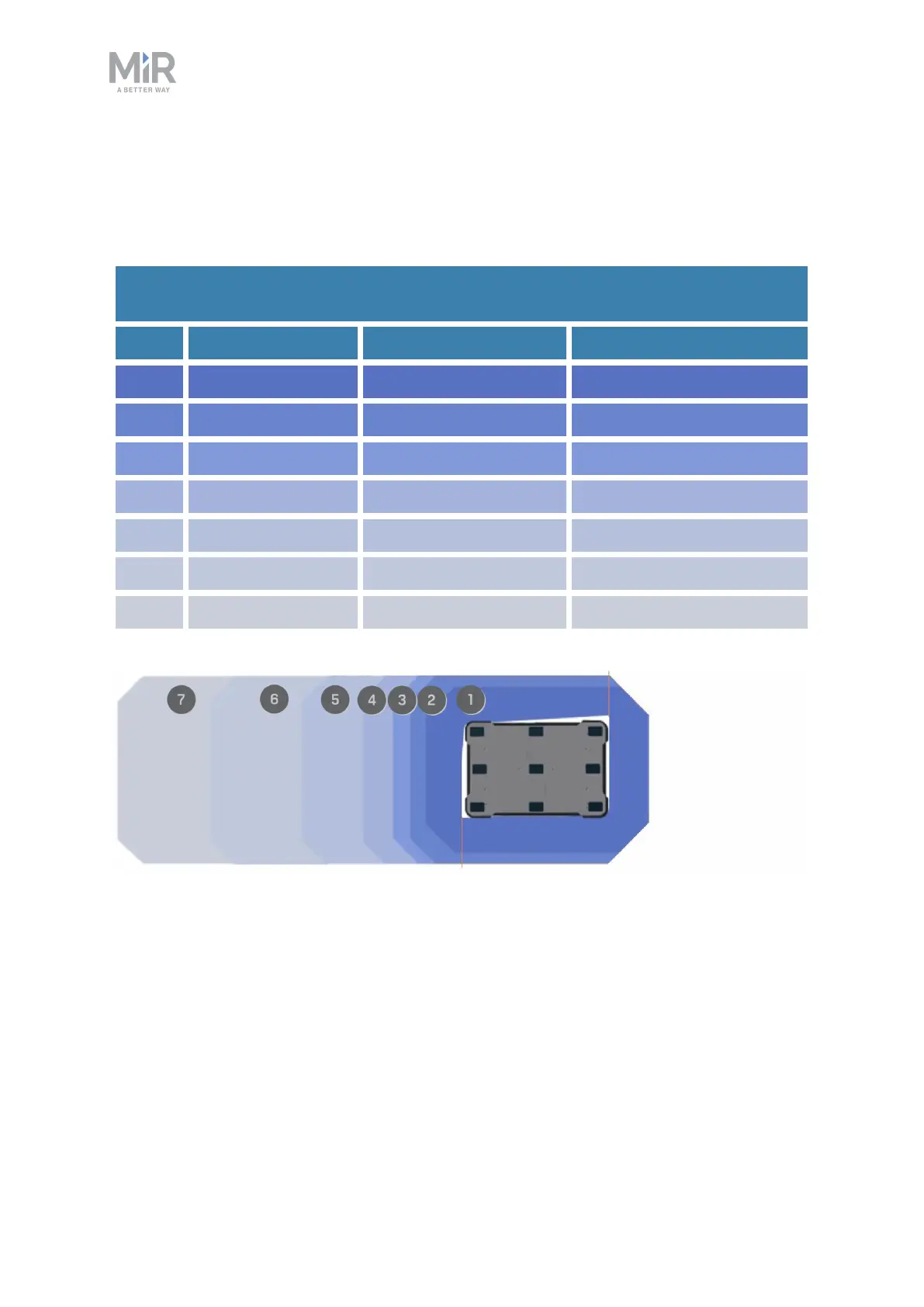
Field set when driving backward
The field set for driving backward is the same as the field set for driving forward. The colors
and cases in Table 10.2 correspond to the field set shown in Figure 10.6.
Case Speed Protective field range Comments
1 0.0 to -0.10 m/s 0-250 mm When pivoting
2 -0.10 to -0.30 m/s 0-374 mm
3 -0.30 to -0.50 m/s 0-542 mm
4 -0.50 to -0.80 m/s 0-813 mm
5 -0.80 to -1.20 m/s 0-1325 mm
6 -1.20 to -1.70 m/s 0-2150 mm
7 -1.70 to -2.10 m/s 0-2962 mm Forward at max. speed
Table 10.2.
Range of the robot's Protective fields within its backward speed interval cases.
Figure 10.6. The illustration shows the field set contours when driving backward. The range of the active field
changes with the robot's speed. The illustration also shows how the front scanner reduces its Protective field to
a minimum when the robot moves backward.