5 - 28
Chapter 5 Data Used for Positioning Control
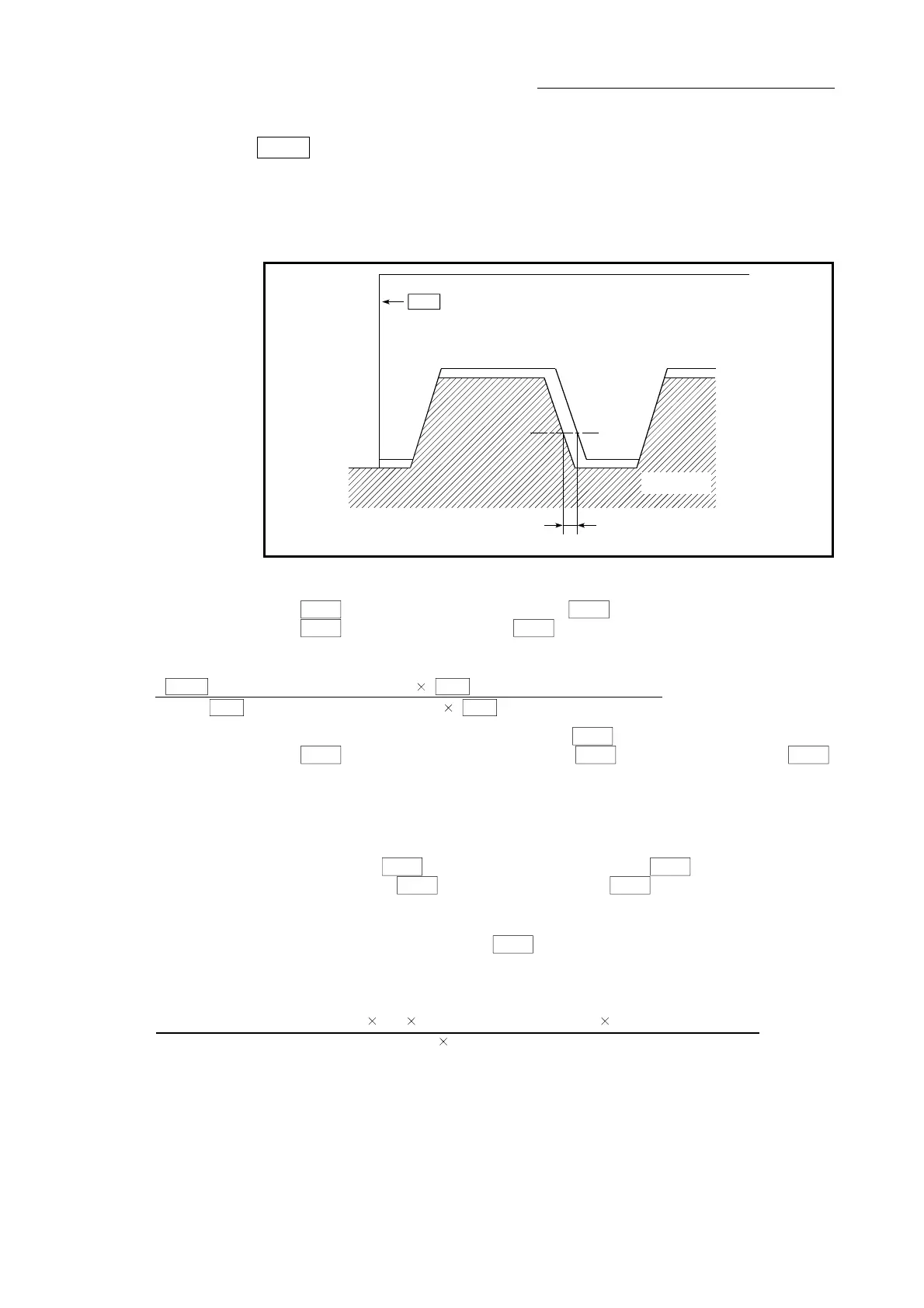
Pr.11
Backlash compensation amount
The error that occurs due to backlash when moving the machine via gears can be
compensated.
When the backlash compensation amount is set, commands equivalent to the
compensation amount will be output each time the direction changes during
positioning.
Workpiece
(moving body)
Worm gear
Backlash
(compensation amount)
Pr.44
OPR direction
1) The backlash compensation is valid after machine OPR. Thus, if the backlash
compensation amount is set or changed, always carry out machine OPR once.
2) "
Pr.2
Number of pulses per rotation", "
Pr.3
Movement amount per rotation",
"
Pr.4
Unit magnification" and "
Pr.11
Backlash compensation amount" which
satisfies the following (1) can be set up.
(
Pr.11
Backlash compensation amount)
(
Pr.2
Number of pulses per rotation)
0
≤
(
Pr.3
Movement amount per rotation)
(
Pr.4
Unit magnification)
( = A)
≤
65535 (PLS) ….(1)
An error (error code: 920) occurs when "
Pr.2
Number of pulses per rotation",
"
Pr.3
Movement amount per rotation", "
Pr.4
Unit magnification" and "
Pr.11
Backlash compensation amount" setting range is lower 0, or 65536 or more.
(the calculation result of the following (1) )
A servo alarm (error code: 2031, 2035 etc.) may be made to occur by kinds of
servo amplifier (servomotor), load inertia and the amount of command of a
cycle time (QD77MS) is set so that the calculation result of the following (1)
may satisfy "
Pr.2
Number of pulses per rotation", "
Pr.3
Movement amount
per rotation ", "
Pr.4
Unit magnification" and "
Pr.11
Backlash compensation
amount" setting range is 0 to 65535.
Reduce the setting value of "
Pr.11
Backlash compensation amount" if a servo
alarm occurs. Use the value of the following (2) as a measure that a servo
alarm does not occur.
(Maximum motor speed (r/min) ) 1.2 (Encoder resolution (PLS/r) ) (Operation cycle (ms))
A
≤
60(s)
1000 (ms)
(PLS) ....(2)

 Loading...
Loading...






