5 - 38
Chapter 5 Data Used for Positioning Control
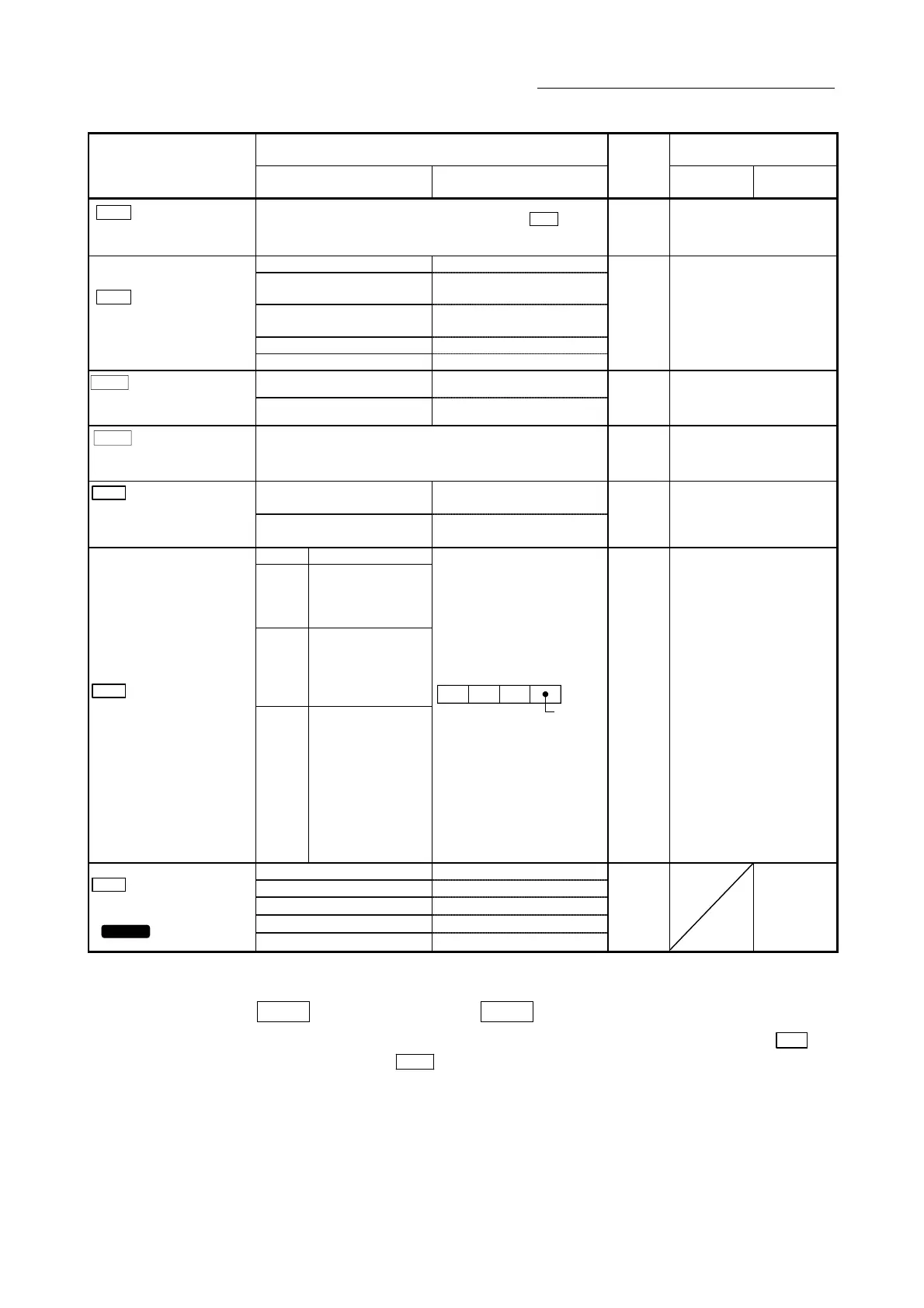
Setting value, setting range
Setting value buffer memory
address
Item
Value set with GX Works2
Value set with sequence
program
Default
value
QD77MS2
QD77MS4
QD77MS16
Pr.41
Allowable circular
interpolation error width
The setting value range differs depending on the "
Pr.1
Unit
setting".
100
60+150n
61+150n
0: External positioning start 0
1: External speed change
request
1
2: Speed-position, position-
speed switching request
2
3: Skip request 3
Pr.42
External command function
selection
4: High speed input request 4
0 62+150n
0: Invalid 0
Pr.83
Speed control 10 x multiplier
setting for degree axis
1: Valid 1
0 63+150n
Pr.84
Restart allowable range
when servo OFF to ON
0, 1 to 327680 [PLS]
0: restart not allowed
0
64+150n
65+150n
0: Differential output type 0
Pr.89
Manual pulse generator/
Incremental synchronous
encoder input type selection
1: Voltage output/open collector
type
1
1 67
b0 to b3 Not used
b4 to b7
Torque initial value
selection
0: Command torque
1: Feedback torque
b8 to
b11
Speed initial value
selection
0: Command speed
1: Feedback speed
2: Automatic selection
Pr.90
Operation setting for speed-
torque control mode
b12 to
b15
Condition selection at
mode switching
0: Switching
conditions valid (for
switching control
mode)
1: Zero speed ON
condition invalid
(for switching
control mode)
b15 to b12b11 to b8 b7 to b4 b3 to b0
Always "0" is
set to the part
not used.
0000H 68+150n
0: Not used 0
1: DI1 1
2: DI2 2
3: DI3 3
Pr.95
External command signal
selection
QD77MS16
4: DI4 4
0
69+150n
n: Axis No.-1
Pr.25
Acceleration time 1 to
Pr.27
Acceleration time 3
These parameters set the time for the speed to increase from zero to the " Pr.8
Speed limit value" (" Pr.31 JOG speed limit value" at JOG operation control) during a
positioning operation.

 Loading...
Loading...






