13 - 83
Chapter 13 Control Sub Functions
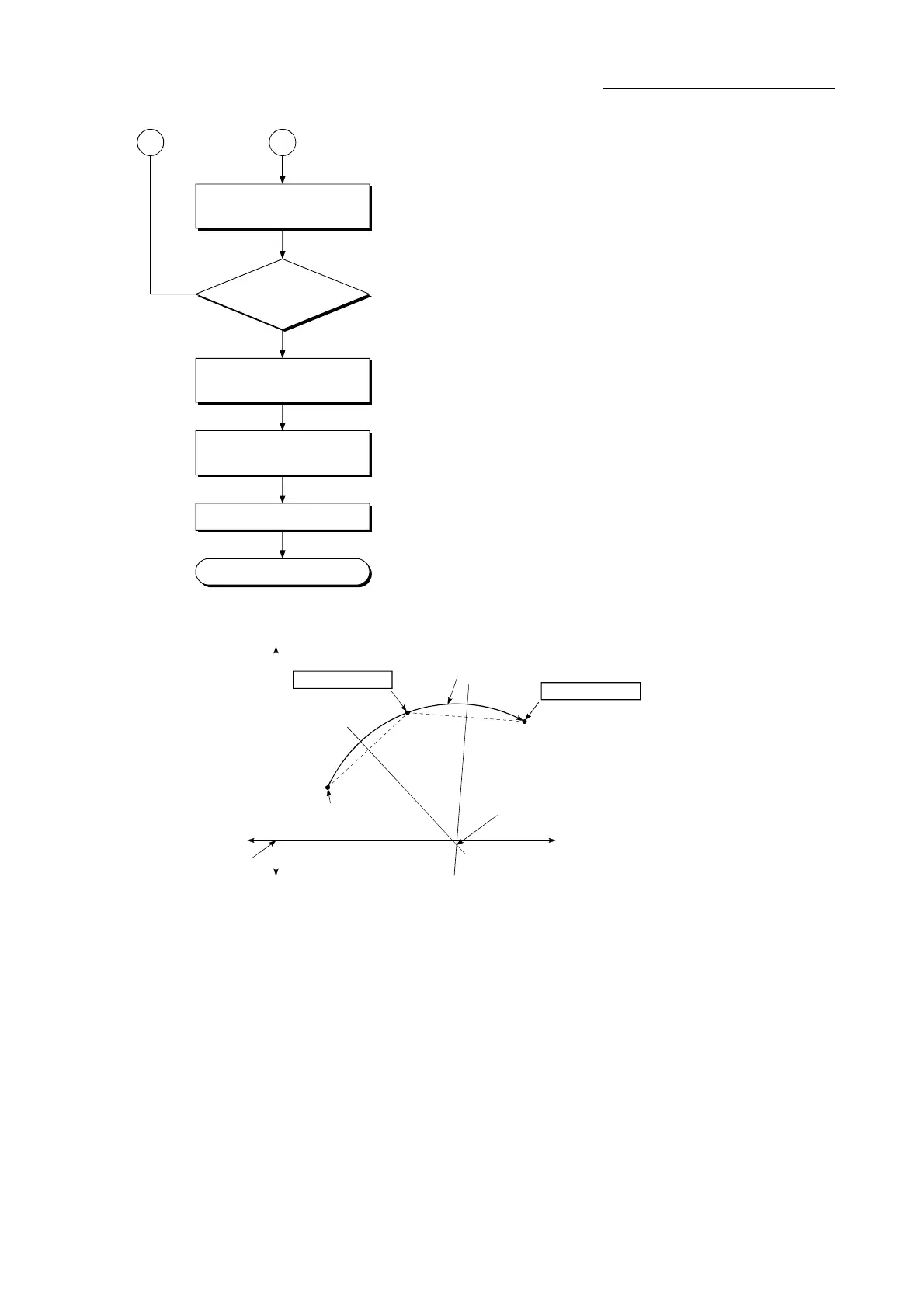
[Motion path]
OP
Reverse direction
Forward direction
(Axis 1)
Arc center point
Movement by circular interpolation
(Axis 2)
Forward direction
(arc address)
(positioning address)
Start point address
(current stop position)
Reverse direction
*1 Sub point address
*2 End point address
2
1
NO
YES
End
Confirm the completion of the writing.
Turn OFF the PLC READY
signal [Y0].
Carry out a writing request to
the flash ROM.
End teaching?
Confirm that the buffer memory address [1900] has become 0.
Set 1 in the buffer memory address [1900].
• • • • • • • •
• • • • • • • •
Entering teaching data to buffer memory address
[1648] and [1649], in the same fashion as for axis 1.
• • • • • • • •
Teaching arc end point
address on axis 2.
[5] Teaching program example
The following shows a sequence program example for setting (writing) the
positioning data obtained with the teaching function to the QD77MS.
(1) Setting conditions
•
When setting the current feed value as the positioning address, write it
when the BUSY signal is OFF.
(2) Program example
•
The following example shows a program to carry out the teaching of axis
1 by the dedicated instruction " ZP.TEACH 1".
1) Move the workpiece to the target position using a JOG operation (or
an inching operation, a manual pulse generator operation).

 Loading...
Loading...






