7 Parameter Details
7 - 24
OMNUC G5-series (Pulse-train Input Type) AC Servomotors and Servo Drives User’s Manual
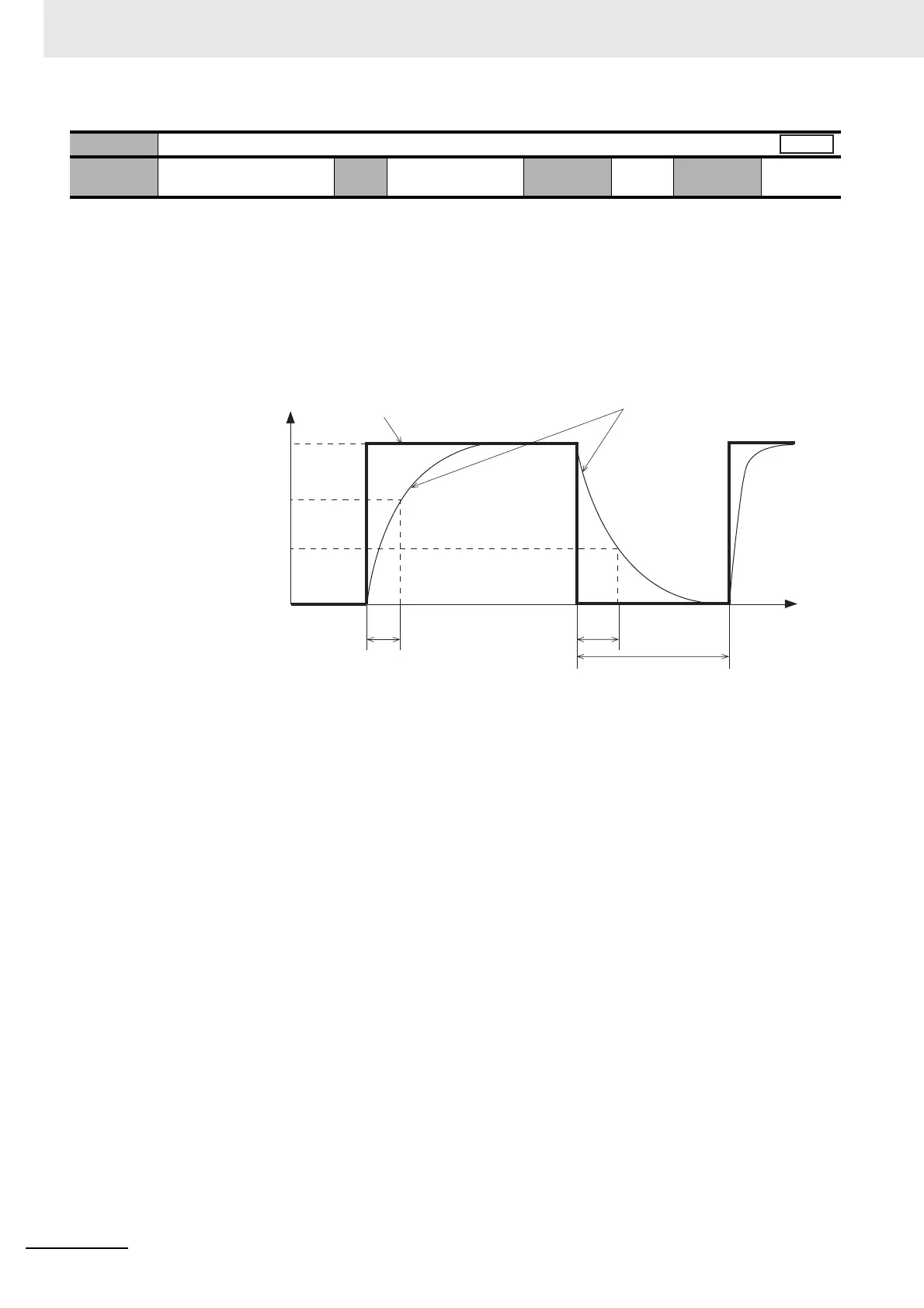
• Position Command Filter Time Constant is the first-order lag filter that is inserted after the electronic
gear ratio for the command pulse input.
• Purposes of Position Command Filter Time Constant:
• This parameter is used basically for reducing the stepwise movement of the Servomotor with
sparse command pulse input
• Specifically, sparse command pulse input may occur in the following cases:
The electronic gear ratio is set to a large value (10 or higher).
The command pulse frequency is low.
Pn222
Position Command Filter Time Constant
Setting
range
0 to 10,000 Unit 0.1 ms Default
setting
0
Cycle the
power supply
–
Position
t
f
= (Pn222 × 0.1 ms)
*1 The actual processing speed is subject to calculation error.
*2 The Servomotor may operate at a higher speed than the original
command speed immediately after filter switching operation, if accumu-
lated pulses remain in the filter after a change in the filter value.
Input position command
t
f
Position command after
smoothing filter processing
t
f
Filter switching
dwell time*2
Time
Speed
Target speed Vc
Vc×0.632
*1
Vc×0.368
*1

 Loading...
Loading...





