85
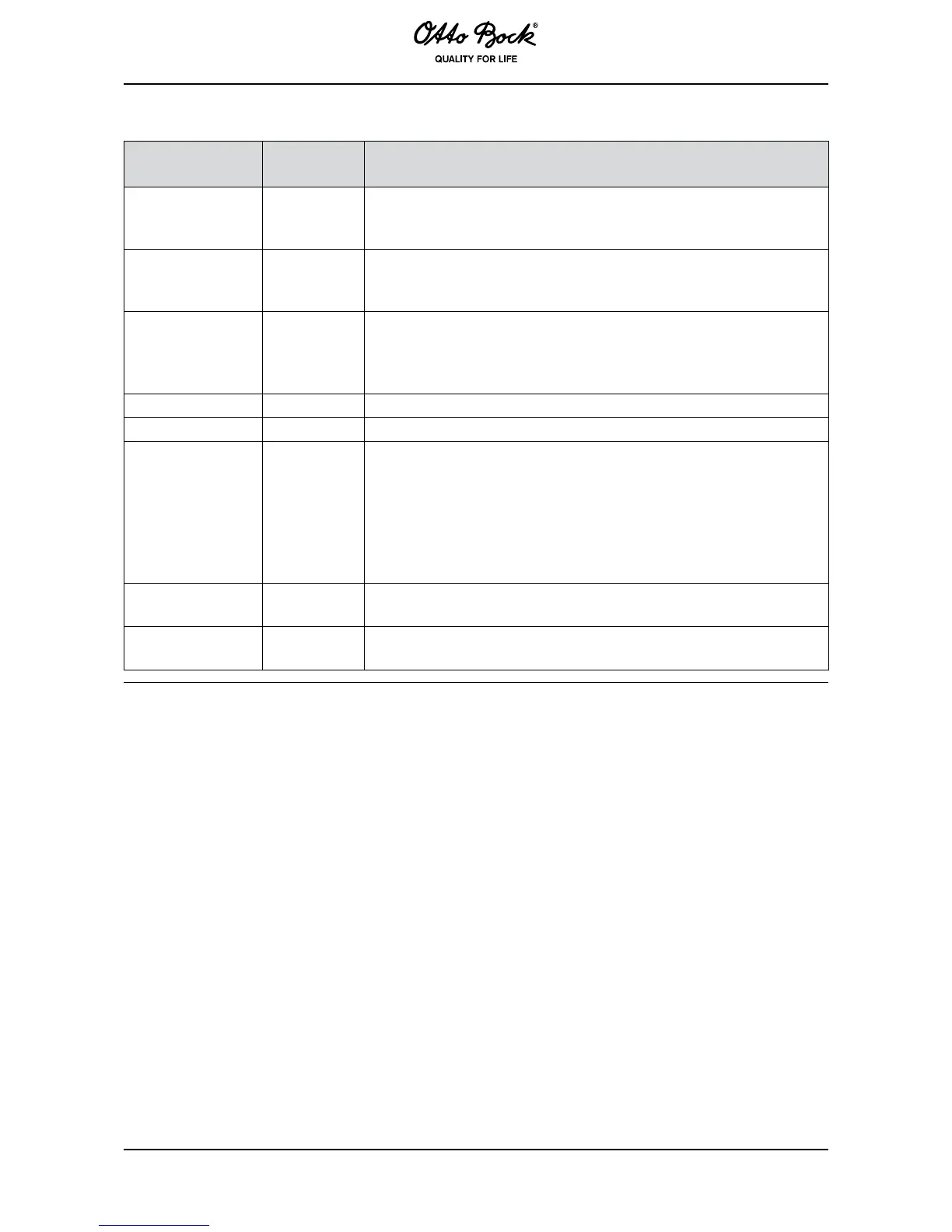
High Speed
Comp
0 – 100 %
Sets the motor load compensation at high speeds. Higher values
mean greater suppression of load variations. Lower values offer
smoother operation.
Low Speed Comp 0 – 100 %
Sets the motor load compensation at low speeds. Higher values
mean greater suppression of load variations. Lower values offer
smoother operation.
Anti Roll Comp 0 – 150 %
This parameter affects the ability to control the power wheelchair
on inclines (ramps or hills). Motor torque is generated to prevent
motion and hold a position until the electromagnetic brake engages.
Higher values result in higher torque.
Comp Speed 0 – 100 % Sets the speed below which Low Speed Comp is activated.
Max Motor Volts 20 – 28 V Sets the maximum current that can be applied to the motor.
Max Push Speed 0 – 100 %
Increases the speed accepted by the motor controller algorithm
when the power wheelchair is turned off and being pushed manually.
When the power wheelchair is pushed with the control unit turned
off, the Powerbase is activated by the generator effect of the drive
motor. In this case, the Powerbase limits the speed of the power
wheelchair to the programmed value by short-circuiting the motors
with PWM.
Brush Comp L/S 0 – 100 %
Determines the amount of additional compensation due to brush
loss at low speeds for front-wheel drive power wheelchairs.
Brush Comp H/S 0 – 100 %
Determines the amount of additional compensation due to brush
loss at high speeds for front-wheel drive power wheelchairs.