12.1 Specifications
12-3
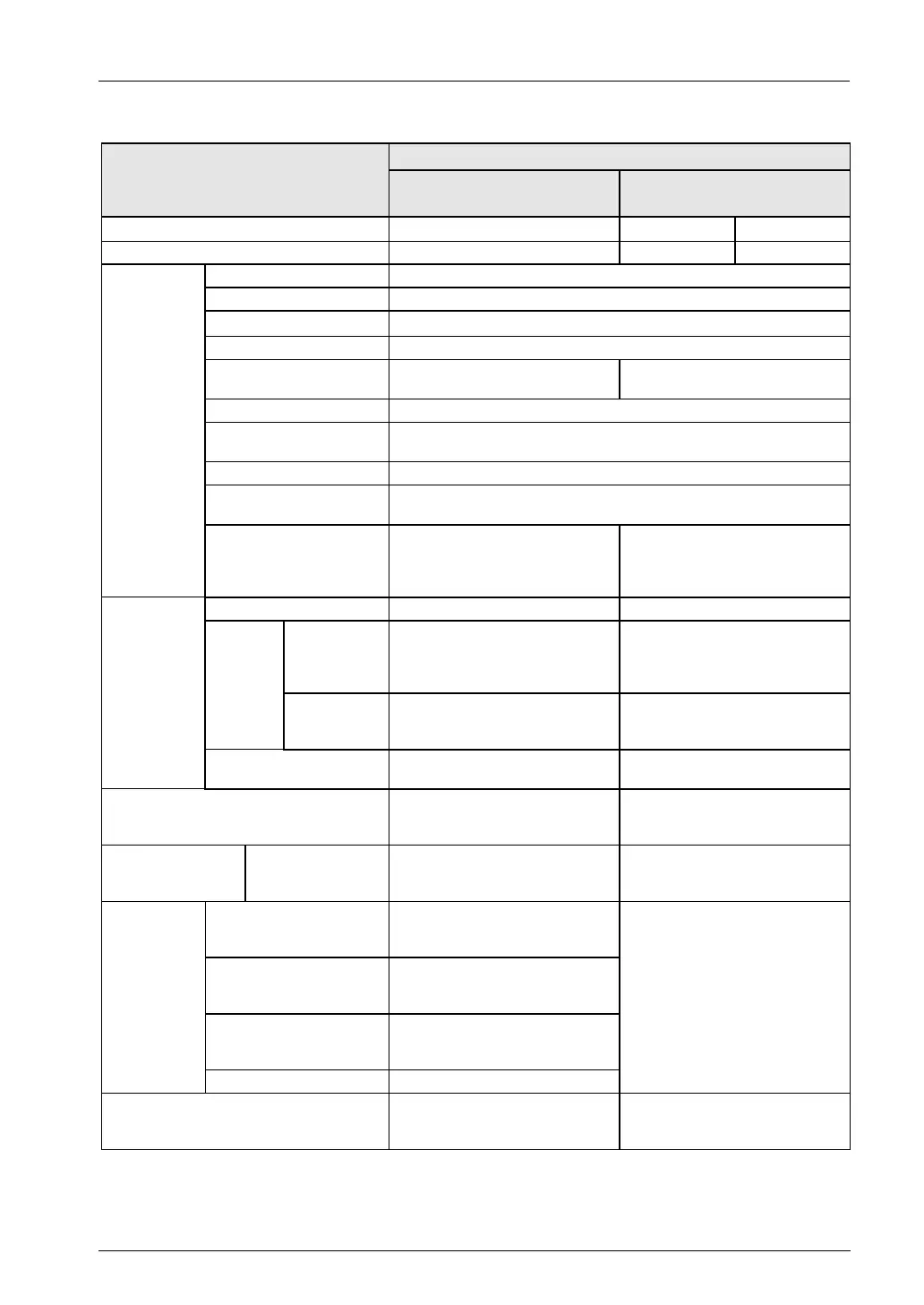
Pulse output function specifications
Item
Specifications
Table setting mode
FP
compatible
instruction mode
Compatible mode FP0H mode FP0H mode
Σ
Number of axes controlled
Common
specifications
Transistor open collector output
Pulse output method
Pulse+Sign, CW+CCW
Output pulse duty ratio 25% (Fixed)
25% / 50%
Position setting range
-1,073,741,824 to 1,073,741,823 pulses
For the interpolation control, -8,388,608 to +8,388,607 pulses
Pulse: 1 to 100,000 pulse/s
Acceleration/deceleration
method
Linear acceleration/deceleration
Acceleration
time/Deceleration time
0 to 10,000 ms (Settable by 1
ms. Acceleration time and
deceleration time can be set
separately.)
30 to 32760 ms (Specify by
instruction. Acceleration time
and deceleration time cannot be
set separately.)
Position
control
No. of positioning tables
Arbitrary (Set by user program)
Control
method
Single axis
PTP control (E-point control, C-
point control), CP control (P-
point control), JOG positioning
control (J-point control) (Note 1)
PTP control (E-point control:
F171 instruction), Multistep
acceleration/deceleration control
2-axis linear
interpolation
E-, P-, C-point control;
composite speed or major axis
speed specification
E-point control, composite
speed specification (175
instruction)
Dwell time
0 to 32,767 ms (Settable by 1
No setting
JOG operation
Acceleration/deceleration can
be specified.
Acceleration/deceleration
cannot be specified.
(F172
Home return Return method
DOG methods (3 types), Home
position method, Data set
method
DOG method x 1, Home return
method x 1 (Select by F171
instruction)
Stop function
Deceleration stop
deceleration time of a running
Each axis stops in the
deceleration time of a running
operation. (Execute by F0
instruction)
Emergency stop
Each axis stops in the
deceleration time specified in
the positioning parameter.
Limit stop
Each axis stops in the
deceleration time specified for
the limit input.
System stop All axes stop.
Memory backup
Positioning parameters and
positioning table data are stored
in F-ROM (without battery).
Data is stored in arbitrary data
registers by user programs.
(Note 1): When performing the J-point control or JOG operation, the speed can be changed after the startup.