3-14 Monitoring and Diagnostics VisualMotion 9 Troubleshooting Guide
DOK-VISMOT-VM*-09VRS**-WA02-EN-P
220 Excessive deviation in PMG%d, see ext. diag.
If the PMG Configuration parameter (C-0-3205, C-0-3215, C-0-3225, C-0-
3235, C-0-3245, C-0-3255, C-0-3265, C-0-3275) bit 2 is set to 0
(Warning), the group is enabled and the current deviation exceeds the
allowed deviation, this warning is displayed. The axis that caused the
deviation will be listed in the extended diagnostic message. Extended
diagnostics can be viewed by selecting Diagnostics ⇒
⇒⇒
⇒ System in
VisualMotion Toolkit.
221 Excessive Master Position Slip Deviation
The slip between the Primary and Secondary ELS Masters has exceeded
the value of the Maximum Deviation Window. (Slip Mon configured for
Warning reaction)
222 ELS Config. Warning, see ext. diag.
Due to the nature of rotary motion, the proper operation of ELS is limited
to velocities less than 180° per SERCOS cycle. Therefore, both the
generation and processing of motion in ELS are being limited to velocities
less than 180° per SERCOS cycle.
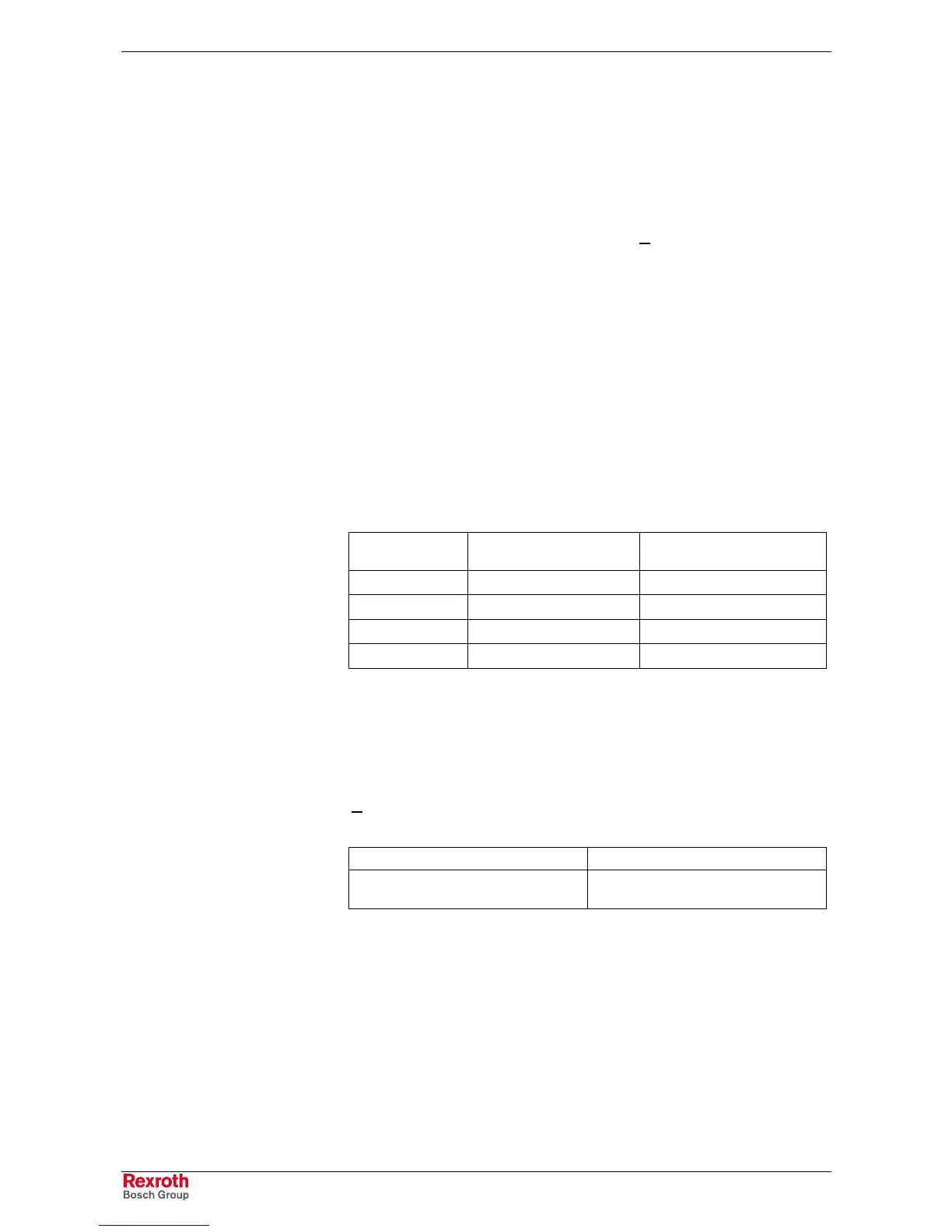
The maximum ELS velocity limit is calculated as a function of the current
SERCOS cycle time.
SERCOS
Cycle Time
Max. ELS Velocity Limit
(180° / SERCOS Cycle)
Max. ELS Velocity Limit
Less 1 RPM
2 ms 15,000 RPM 14,999 RPM
4 ms 7,500 RPM 7,499 RPM
8 ms 3,750 RPM 3,749 RPM
16 ms 1,875 RPM 1,874 RPM
Table 3-6: Maximum ELS Velocities
Cause:
The jogging velocity G#_JOG_VEL (where # = ELS Group number) for
the specified ELS Group exceeds the Maximum ELS Velocity for the
current SERCOS cycle time. This warning is issued with an extended
diagnostic. Extended diagnostics can be viewed by selecting
Diagnostics ⇒
⇒⇒
⇒ System in VisualMotion Toolkit. The following extended
diagnostic message is available:
Extended Diagnostic C-0-0124 Description
Group %d Jog Vel. Limited to %.f
RPM
%d = ELS Group number 1-8
%.f = Max. ELS velocity less 1 RPM
Table 3-7: ELS Config. Warning Extended Diagnostic
Remedy:
To correct the problem, the ELS Group’s jogging program variable
G#_JOG_VEL must be set to a value that does not exceed the calculated
Max ELS Velocity Limit less 1 RPM.