12.12 Installation → Features
Add Point
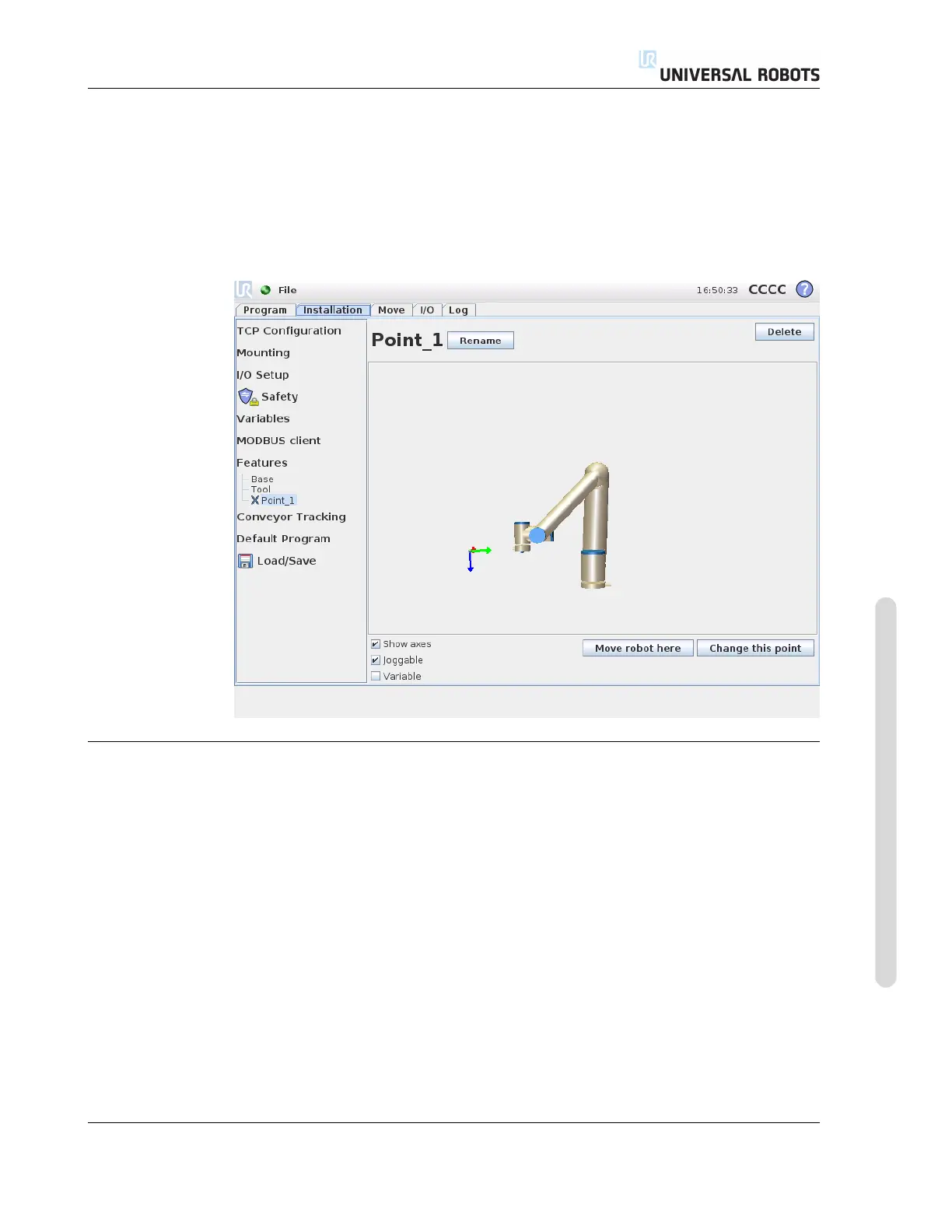
Push this button to add a point feature to the installation. The position of a point
feature is defined as the position of the TCP at that point. The orientation of the point
feature is the same as the TCP orientation, except that the feature coordinate system is
rotated 180 degrees about its x-axis. This makes the z-axis of the point feature directed
opposite than that of the TCP at that point.
Add Line
Push this button to add a line feature to the installation. A line is defined as an axis
between two point features. This axis, directed from the first point towards the second
point, will constitute the y-axis of the line coordinate system. The z-axis will be defined
by the projection of the z-axis of the first sub point onto the plane perpendicular to the
line. The position of the line coordinate system is the same as the position for the first
sub point.
Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.
II-35 CB3