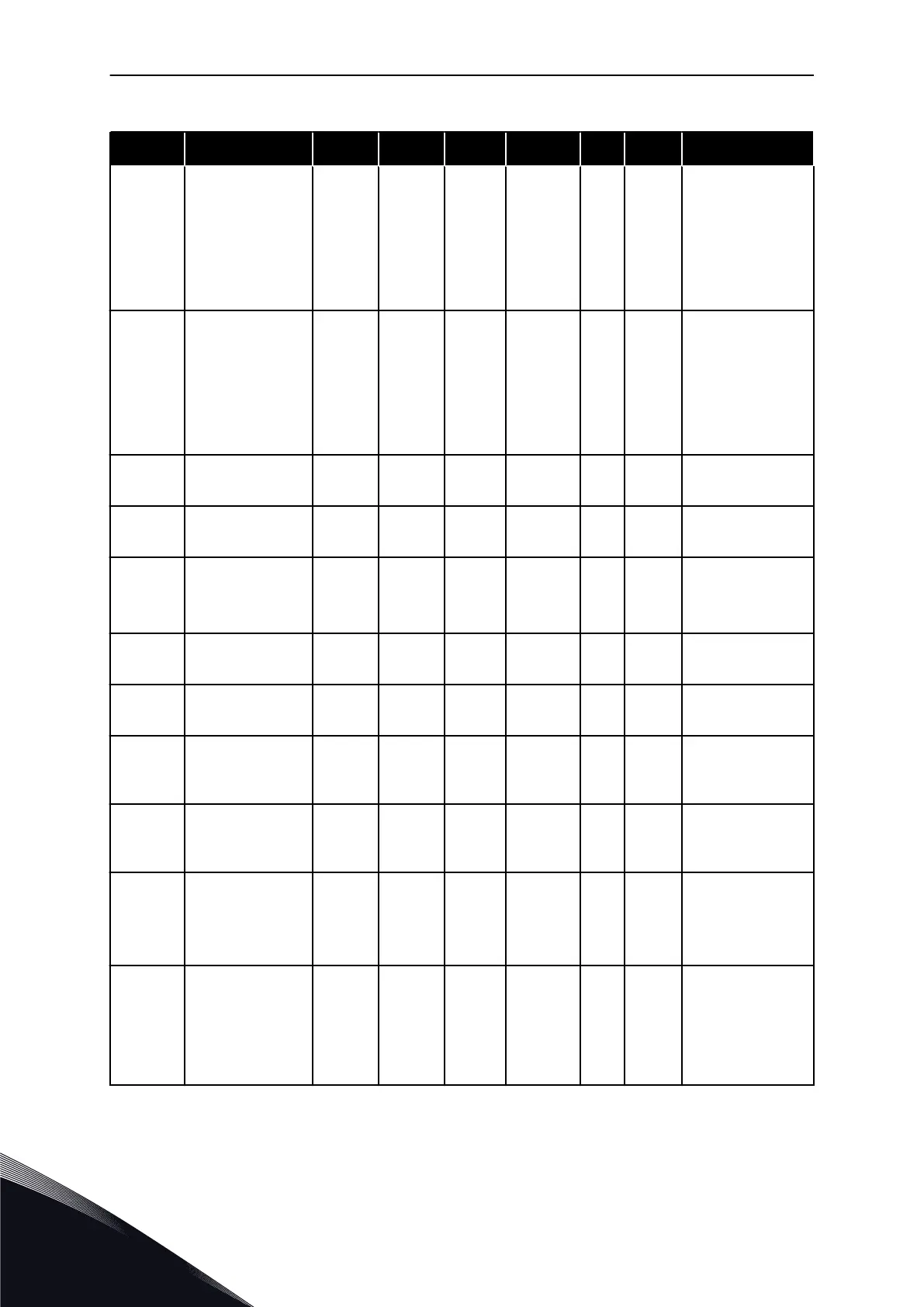
Table 36: Input signals, G2.2
Index Parameter Min Max Unit Default Cust ID Description
P2.2.28
Motor potentiom-
eter frequency
reference mem-
ory reset
0 2 1 367
0 = No reset
1 = Reset if stop-
ped or powered
down
2 = Reset if pow-
ered down
P2.2.29
Motor potentiom-
eter PID reference
memory reset
0 2 0 370
0 = No reset
1 = Reset if stop-
ped or powered
down
2 = Reset if pow-
ered down
P2.2.30
PID minimum
limit
-1600.0 P2.2.31 % 0.0 359
P2.2.31
PID maximum
limit
P2.2.30 1600.0 % 100.0 360
P2.2.32
Error value inver-
sion
0 1 0 340
0 = No inversion
1 = Inversion
P2.2.33
PID reference ris-
ing time
0.1 100.0 s 5.0 341
P2.2.34
PID reference
falling time
0.1 100.0 s 5.0 342
P2.2.35
Reference scaling
minimum value,
place B
0.00 320.0 Hz 0.00 344
P2.2.36
Reference scaling
maximum value,
place B
0.00 320.0 Hz 0.00 345
P2.2.37 Easy changeover 0 1 0 366
0 = Keep reference
1 = Copy actual
reference
P2.2.38
***
AI3 signal selec-
tion
0.1 E.10 0.1 141
TTF programming
method used. See
Chapter 8.9 "Ter-
minal to function"
(TTF) programming
principle.
VACON · 108 PID CONTROL APPLICATION
5
TEL. +358 (0)201 2121 · FAX +358 (0)201 212 205
 Loading...
Loading...












