By default, analog inputs A1 and A2 are set for this function. Simultaneously using A1 and A2 increases the frequency reference
by the total of all inputs.
Example: If the analog frequency reference from analog input terminal A1 is 50% and a bias of 20% is applied by analog input
terminal A2, the resulting frequency reference will be 70% of the maximum output frequency.
Setting 1: Frequency Gain
The input value of an analog input set to this function will be multiplied with the analog frequency reference value.
Example: If the analog frequency reference from analog input terminal A1 is 80% and a gain of 50% is applied from analog
input terminal A2, the resulting frequency reference will be 40% of the maximum output frequency.
Setting 2: Auxiliary Reference 1
Sets the auxiliary frequency reference 1 when multi-step speed operation is selected. Refer to Multi-Step Speed Selection on
page 59 for details.
Setting 3: Auxiliary Reference 2
Sets the auxiliary frequency reference 2 when multi-step speed operation is selected. Refer to Multi-Step Speed Selection on
page 59 for details.
Setting 4: Output Voltage Bias
Voltage bias boosts the output voltage of the V/f curve as a percentage of the maximum output voltage (E1-05). Available
only when using V/f Control.
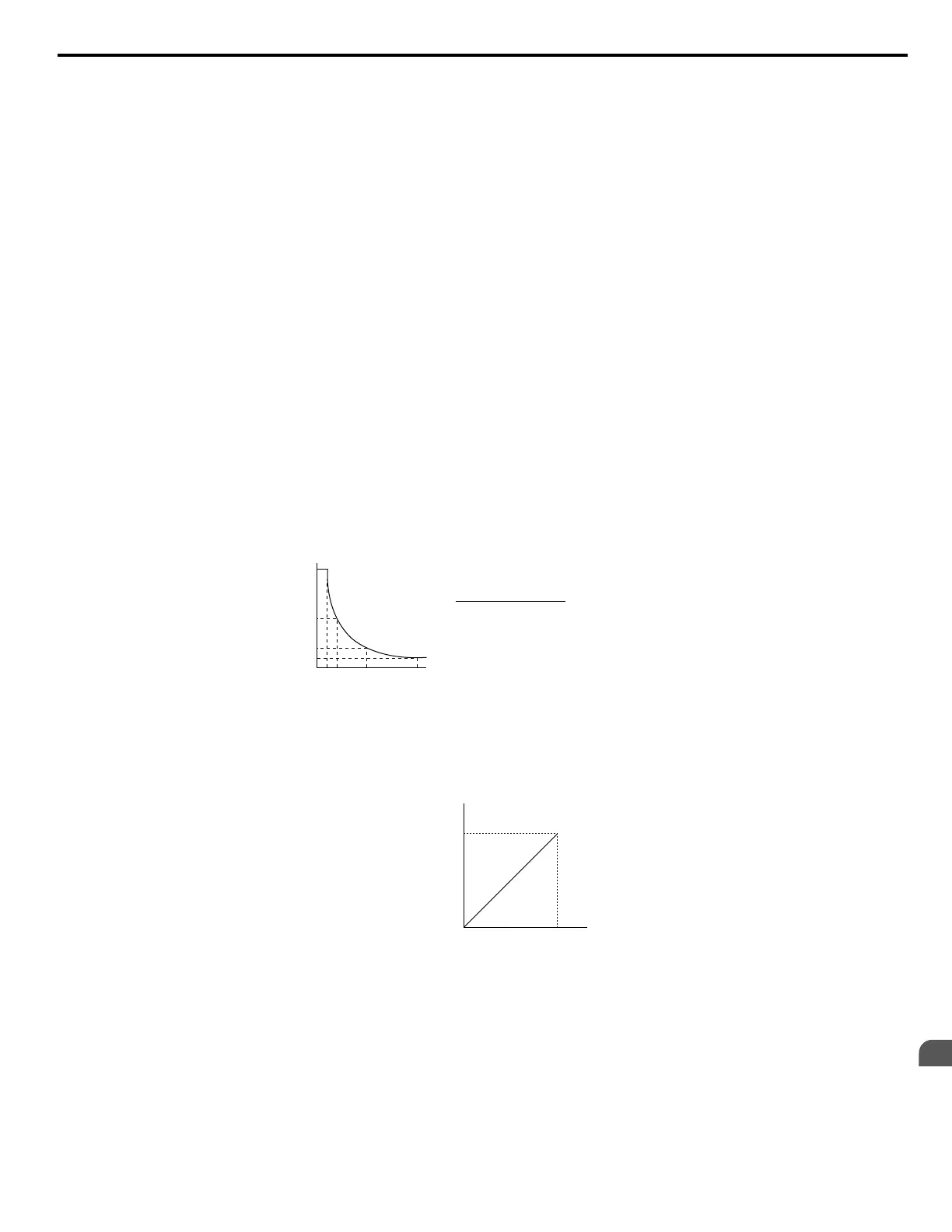
Setting 5: Accel/Decel Time Gain
Adjusts the gain level for the acceleration and deceleration times set to parameters C1-01 through C1-08.
The drive acceleration time is calculated by multiplying the gain level to C1-oo as follows:
C1-oo × Accel/decel time gain = Drive accel/decel time
100%
50%
0 5 V 10 V1V 2V
20%
10%
Acceleration/deceleration gain from 1 to 10 V
(10 V)
Input Voltage (V)
×
10 (%)
=
Figure 1.77 Accel/Decel Time Gain with Analog Input Terminal
Setting 6: DC Injection Braking Current
The current level used for DC Injection Braking is set as a percentage of the drive rated current.
Drive Rated
Current
0
(4)
100%
10 V
(20 mA)
DC Injection Braking Current Level
Figure 1.78 DC Injection Braking Current Using an Analog Input Terminal
Setting 7: Torque Detection Level
Using this setting, the overtorque/undertorque detection level for torque detection 1 (L6-01) can be set by an analog input.
The analog input replaces the level set to L6-02. An analog input of 100% (10 V or 20 mA) sets a torque detection level equal
to 100% drive rated current/motor rated torque. Adjust the analog input gain if higher detection level settings are required.
Refer to L6: Torque Detection on page 148 for details on torque detection.
1.7 H: Terminal Functions
YASKAWA ELECTRIC SIEP YEAHHP 01B YASKAWA AC Drive – A1000 HHP Programming Manual
119
1
Parameter Details

 Loading...
Loading...










