Setting 65, 66: KEB Ride-Thru 1 (N.C.), 2 (N.O.)
Enables the KEB Ride-Thru function selected in parameter L2-29.
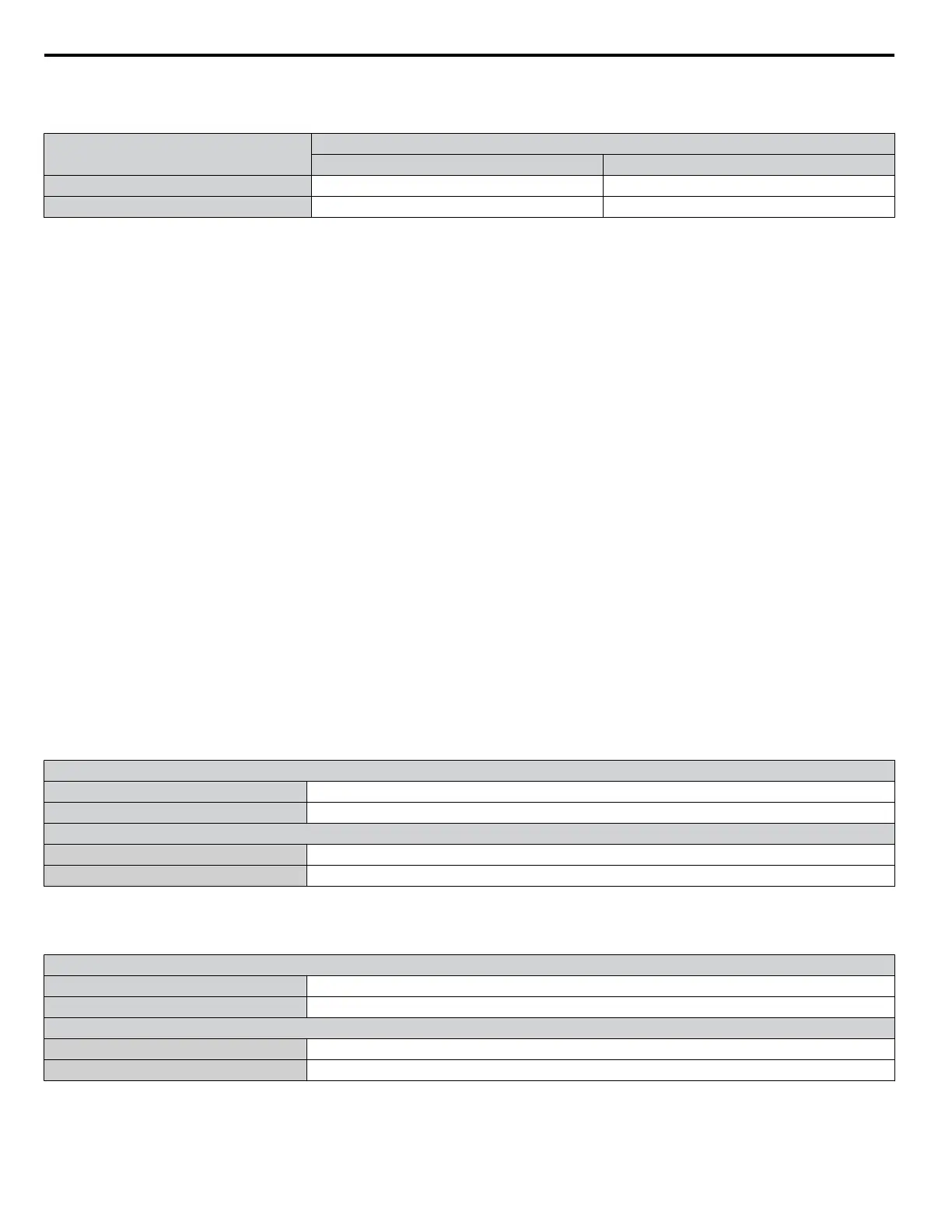
Digital Input Function
Drive Operation
Input Open Input Closed
Setting 65 (N.C.) KEB Ride-Thru Deceleration Normal operation
Setting 66 (N.O.) Normal operation KEB Ride-Thru Deceleration
Note: Simultaneously assigning KEB Ride-Thru 1 and KEB Ride-Thru 2 to the input terminals will trigger an oPE03 error.
Setting 67: Communication Test Mode
The drive has a built-in function to self-diagnose serial communications operation. The test involves wiring the send and
receive terminals of the RS-422/RS-485 port together. The drive transmits data and then confirms that the communications
are received normally. Refer to Self-Diagnostics on page 263 for details on how to use this function.
Setting 68: High Slip Braking
Closing an input programmed for this function triggers High Slip Braking (available only in V/f control mode). After starting
HSB, bring the drive to a complete stop and remove the HSB command before restarting. Refer to n3: High Slip Braking
(HSB) and Overexcitation Braking on page 124.
Setting 69: Jog 2
The Jog 2 function applies to 3-Wire control only. If a digital input is configured as Jog 2 (H1-oo = 69) when the drive is
not in 3-Wire Control, an oPE03 fault will occur.
The Jog 2 input causes the drive to ramp to the Jog Frequency Reference (d1-17) in the direction dictated by the Fwd/Rev
input of the 3-Wire Control mode. Acceleration to and from the Jog Frequency Reference is determined by the active Accel/
Decel parameters.
Setting 6A: Drive Enable
A digital input configured as a “Drive enable” (H1-oo = 6A) will prevent the drive from executing a Run command until
the input is closed. When the input is open, the HOA keypad will display “dnE” to indicate that the drive is disabled.
If a Run command is enabled before the terminal set for “Drive enable” closes, then the drive will not run until the Run
command is cycled (i.e., a new Run command is required). If the input is opened while the drive is running, the drive will stop
according to the stop method set to b1-03 (Refer to b1-03: Stopping Method Selection on page 26).
Setting 6D: AUTO Mode Select
Sets the behavior when AUTO Mode is selected.
Legacy Operation Mode (S5-04 = 0)
Open Drive is in OFF or HAND mode
Closed Drive is in AUTO mode (when HAND Mode Select input is open)
Normal Operation Mode (S5-04 = 1)
Open HAND reference is selected (based on S5-01)
Closed AUTO reference is selected (based on b1-01)
Setting 6E: HAND Mode Select
Sets the behavior when HAND Mode is selected.
Legacy Operation Mode (S5-04 = 0)
Open Drive is in OFF or AUTO mode
Closed Drive is in HAND mode (when AUTO Mode Select input is open)
Normal Operation Mode (S5-04 = 1)
Open HAND reference is selected (based on S5-01)
Closed AUTO reference is selected (based on b1-01)
1.7 H: Terminal Functions
80
YASKAWA SIEP YAIZ1U 03B YASKAWA AC Drive – Z1000 Programming Manual

 Loading...
Loading...










