27-3
SM80B22M02E
3. Option flag-0 setting
Various setting is prepared for adjustment of Track control. Although, these settings are usually
used in developing of interface with ECDIS, the default setting is standard in the present condition.
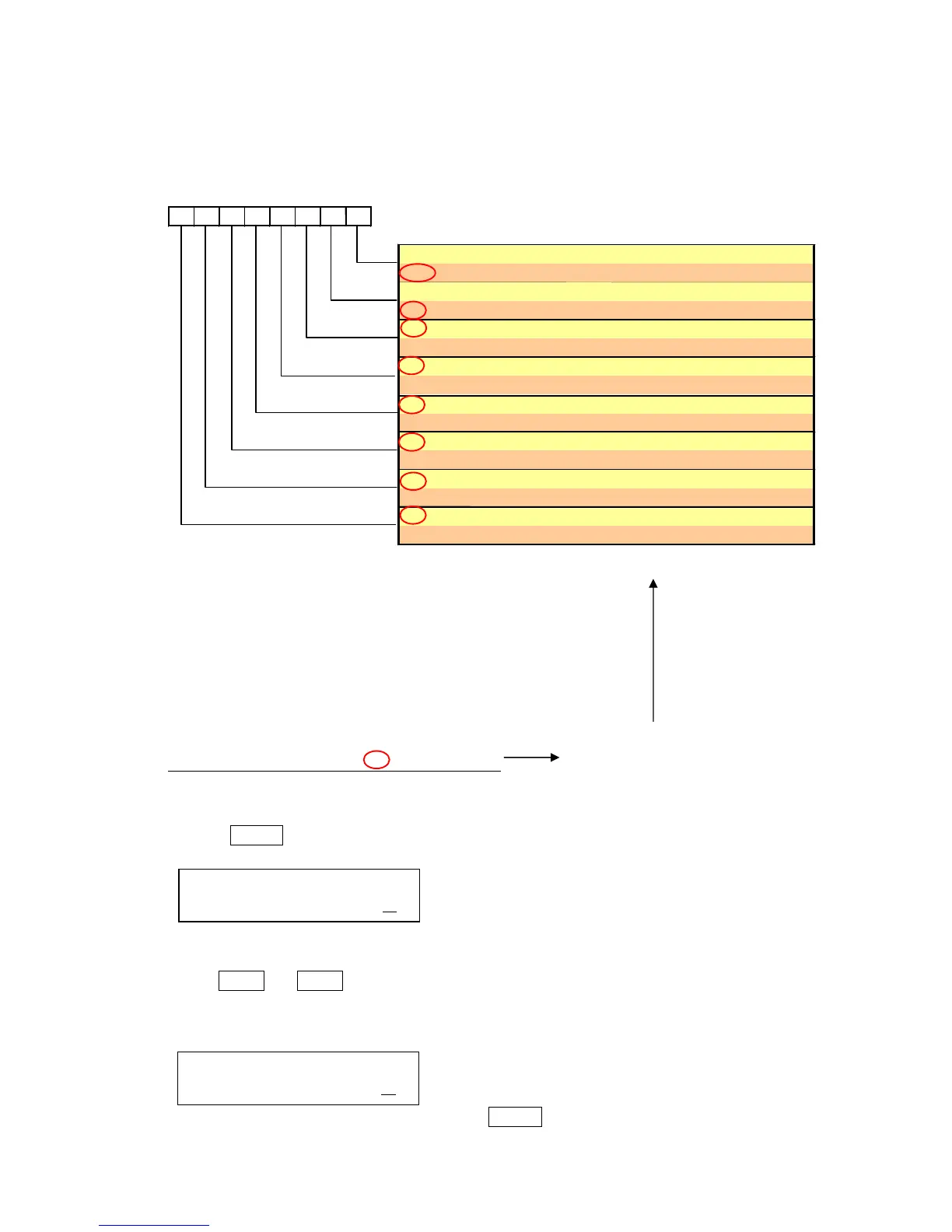
This flag is composed of 8 bits and the setting is done by the hexadecimal number
The contents of each bit are as follows;
<Exp.>
STW data is used
...0
HDG data is used
...0
ROT data based on COG is used.
...1
The corrected radius data is used in the initial rudder angle calculation at starting turn
...1
SOG data is used only during turn.
...0
The end of turn is based on COG
...0
SOG data is used in t
he calculation of setting ROT
...1
The setting ROT is collected by speed ratio in the turn
...0
Set [4C] as this setting, since each falgs become [01001100].
Default : [03] (refer to mark
in above table.)
[03] : The actual rate of turn is used for turning control.
[4C] : The estimated rate of turn by Kalman filter is used for turning control.
(1)Press the
ENTER
ENTERENTER
ENTER
key after displayed "
Flag-0(Hex)=
"on the data display.
Data display becomes current setting mode.
←Cursor position is inputting point
The part of a ## is displayed current setting condition.
(2) Press
△
△△
△
+
++
+
or
▽
▽▽
▽
-
--
-
key to set the cursor point. Then change the data by turning the Set
course dial. Turn to the clockwise direction, data is increased and turn to the counter clockwise
direction, data is decreased. (Data is 0 to F hexadecimal number)
(3)After input the hexadecimal number , then press
ENTER
ENTERENTER
ENTER
key.
D7
=0:STW data is used
=1:SOG data is used
=0:HDG data is used.
=1:COG data is used
=0:ROT data based on HDG is used.
=1:ROT data based on COG is used.
=0:
The calculation of initial rudder angle at starting turn is normal
=1:
The corrected radius data is used in the initial rudder angle calculation at starting turn
=0:SOG data is used only during turn.
=1:SOG data is always used
=0:The end of turn is based on COG
=1:The end of turn is based on HDG.
=0:STW data is used in t
he calculation of setting ROT
=1:SOG data is used in t
he calculation of setting ROT
=0:The setting ROT is collected by speed ratio in the turn
=1:The setting ROT is always collected by speed ratio.
 Loading...
Loading...