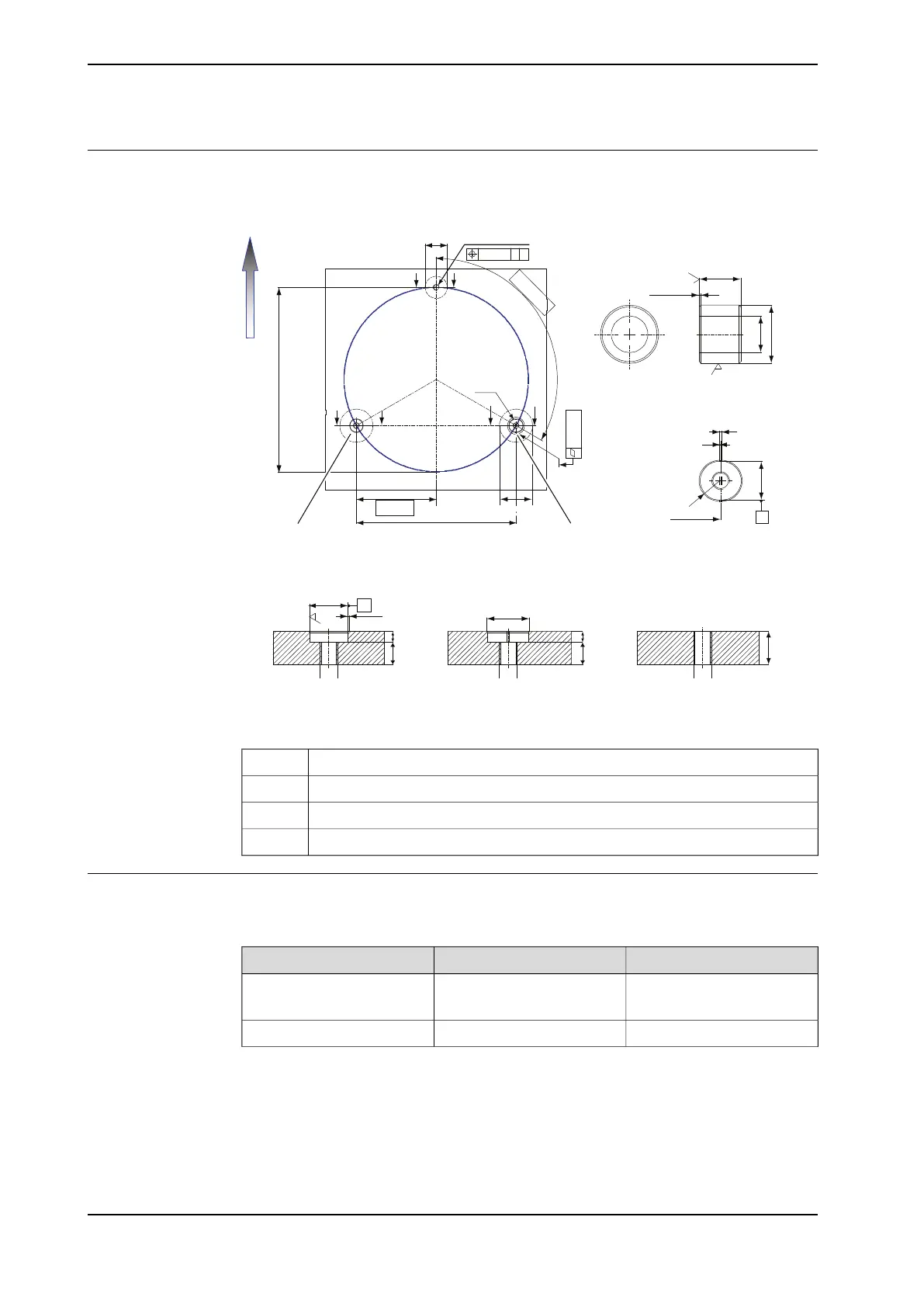
Dimension, mounting surface and guide bushing
The figure shows the dimension of the mounting surface and guide bushings.
G
G
Ø0.5
A
B
Ø60
C
C
(3X120º)
B
B
D
0.5
A
A
500
216.5
433 ±0.5
A-A B-B
2x Ø 902x Ø 90
(37)
+0.024
-0.015
J8
Ø35
1x45º
1.6
C-C
(433±0.5)
B
R
+0.024
-0.015
J8
Ø35
1
1.6
2.5
25
2x 1x45º
Ø22
-0.025
-0.050
f7
Ø 35
(A)
A
(C)
(D)
E
F
Ø
30 min
20 min
1
0
M16
20 min
1
0
M16 M16
xx1700001492
3x common zone(C)
Position of the front of the robotE
M16 (3 pcs)F
Guide bushings (2 pcs)G
Specification, attachment screws
The table specifies the type of securing screws and washers to be used to secure
the robot to the foundation or base plate.
NoteDimensionSecuring parts/Facts
3 pcsM16 x 60Securing screws, oiled
200 NmQuality 8.8
3 pcs17 x 30 x 3Washers
Continues on next page
72 Product manual - IRB 2600
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.5 Orienting and securing the robot
Continued

 Loading...
Loading...





