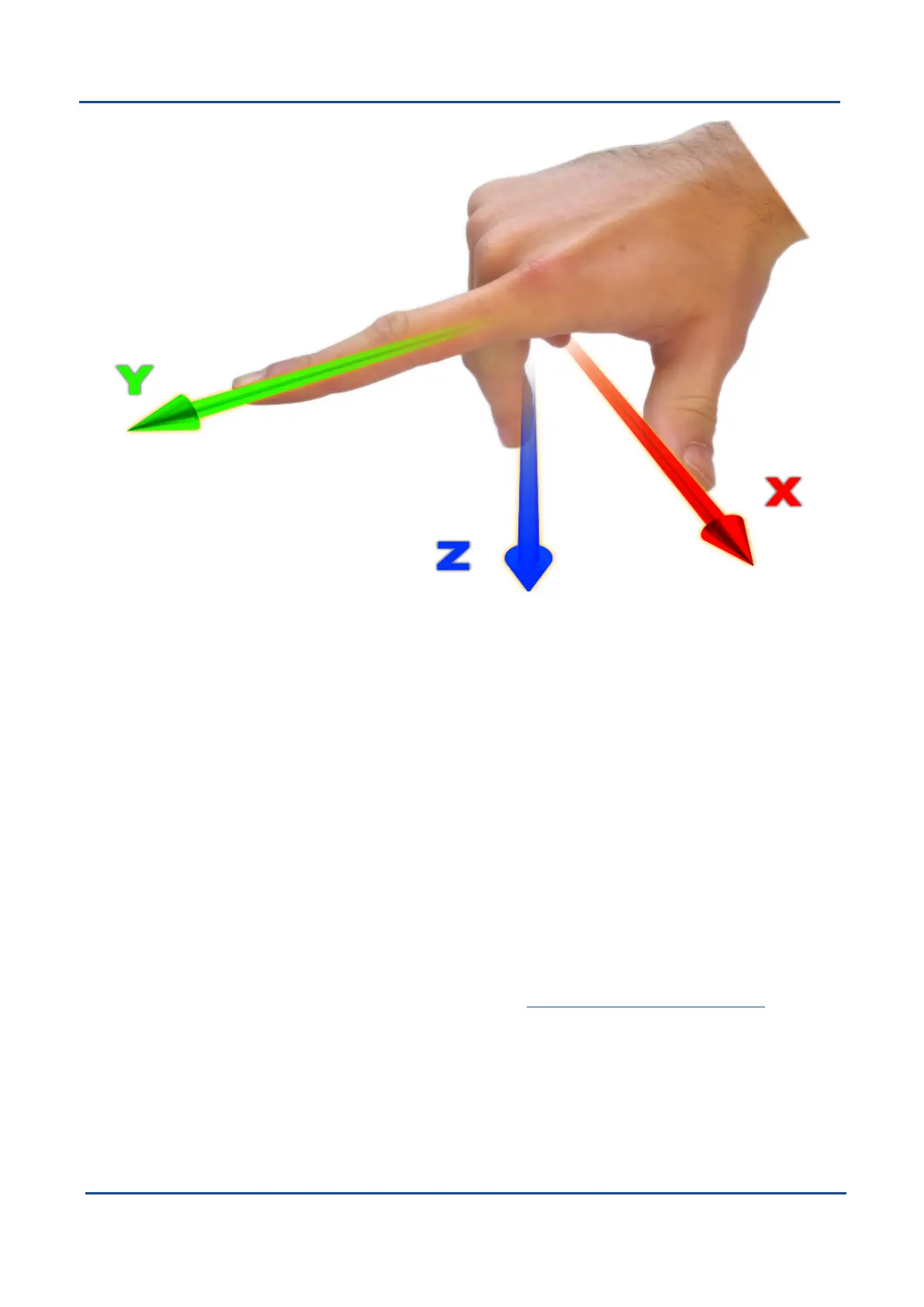
Figure 54: First Right-hand Rule
You take your right hand and extend your thumb, index and middle. Your thumb then denotes the positive X
axis, your index denotes the positive Y axis and your middle denotes the positive Z axis.
11.3 The Body Co-ordinate Frame
Also known as the vehicle co-ordinate (reference) frame, this can be described most easily using a car (the
body or vehicle) as an example. The forward direction of travel for a car is the positive X axis, out to the right of
the car is the positive Y axis, and down is the positive Z axis. The distinction between the sensor co-ordinate
frame and the body co-ordinate frame becomes important when the INS device is not mounted with its axes
aligned to the vehicle axes, for example when the INS is mounted with a 90 degree heading rotation. Offset
measurements, which are described later in this document, will always be in the body co-ordinate frame to
remove any INS alignment variations. Generally any data output by the INS using the X, Y and Z axes will be
using the body co-ordinate frame.
11.4 Roll, Pitch and Heading
Orientation can be described by the three angles roll, pitch and heading: these are known as the Euler angles.
The rotation axes of roll, pitch and heading are shown visually in Figure 53: GNSS Compass Axes. The arrow
indicates the positive rotation direction.
Roll is the angle around the X axis and is zero when the unit is level. Pitch is the angle around the Y axis and is
zero when the unit is level. Heading is the angle around the Z axis and is zero when the positive X axis is
pointing to true north.
v2.0 Page 123 04 Nov 2021
GNSS Compass Reference Manual • GNSS Compass Reference Information