4. Configuration
210
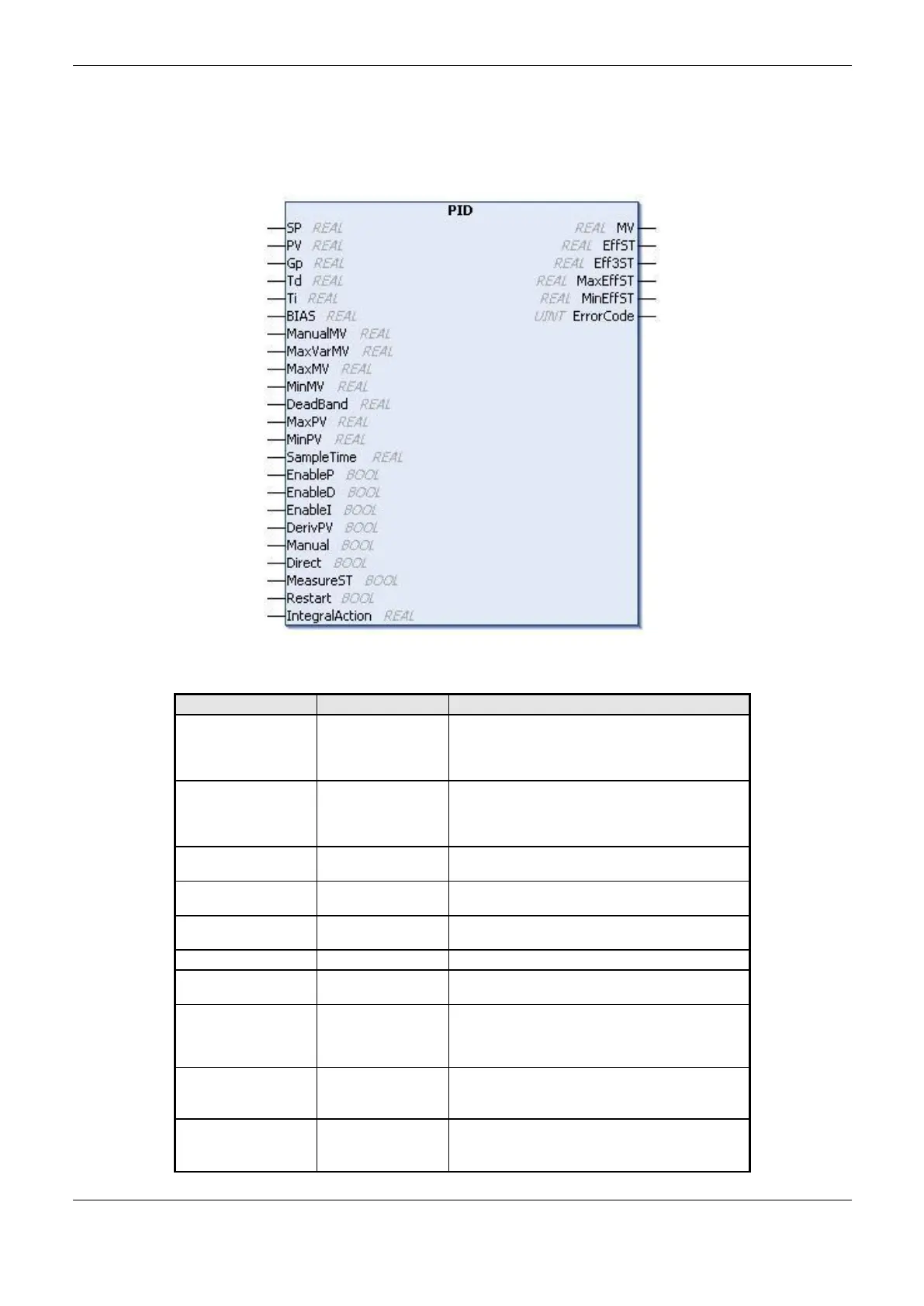
PID Function Block
The PID function block is used to control a real process. The block is always available in the
NextoPID library which must be added to the project (for the library insertion proceeding, see
MasterTool IEC XE Programming Manual – MP399608, chapter Library).
Figure 4-104. PID Block
Set point.
The unit and the interval must be the same in
comparison with the PV as both variables can be
compared.
Process variable.
The unit and the interval must be the same in
comparison with the SP as both variables can be
compared.
Proportional gain used to calculate the PID block
proportional action.
Derivative time, in seconds, used to calculate the
PID block derivative action.
Integral time, in seconds, used to calculate the PID
block integral action.
Compensation added to the handled variable.
Value attributed to the manipulated variable when
using the manual mode.
Manipulated variable maximum variation between
the actual cycle and the previous cycle. In case is
zero or negative, the PID block has no MV variation
limit.
Manipulated variable maximum value.
In case the calculated value is higher than the
configured, the MV will be the same as MaxMV.
Manipulated variable minimum value.
In case the calculated value is smaller than the
configured, the MV will be the same as MinMV.
 Loading...
Loading...