4. Configuration
211
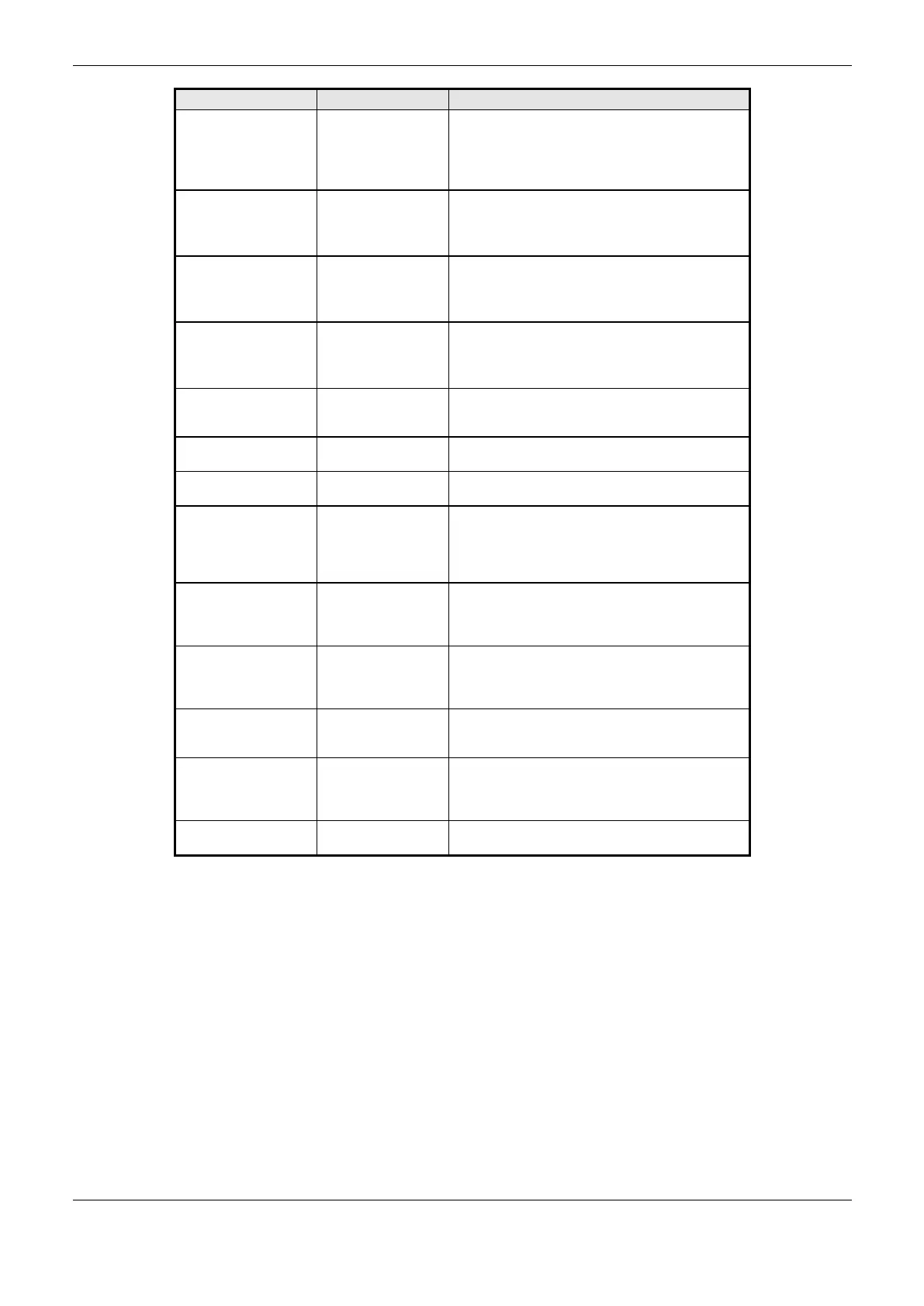
Dead band.
Minimum error value able to generate a MV
correction in automatic mode, in other words, little
errors (smaller than the DeadBand) won’t cause any
variation in the defined variable.
Process variable maximum value.
In case the PV value is higher than the configured,
the PID block will stop the calculus and an error
code will be generated in the output.
Process variable minimum value.
In case the PV value is smaller than the configured,
the PID block will stop the calculus and an error
code will be generated in the output.
Sample time.
Defines the PID block call period, in seconds,
varying from 0.001s to 1000s. This parameter is not
considered if the MeasureST is true.
When true, enables the PID block proportional
action. In case is false, the proportional action is
zero.
When true, enables the PID block derivative action.
In case is false, the derivative action is zero.
When true, enables the PID block integral action. In
case is false, the integral action is zero.
When true, the derivative action is calculated in the
process variable. It’s different than zero only when
PV is changed. In case if false, the derivative action
is calculated in the error, when depends on the SP
and PV variables.
When true, enables the manual mode. In case is
false, enables the automatic mode. The PID block
control mode affects the way the MV and the
integral action are calculated.
When true, select the direct control when the MV is
included in the answer to be included in PV. In case
is false, select the reverse control when MV is
subtracted from the answer to be included in PV.
When true, the sample time is measured. When
false, the sample time is informed by the user in the
SampleTime variable.
When true, the PID block is restarted, initializing all
variables. It can also be used to erase the integral
and derivative actions and the error codes in the
block output.
Stores the integral action which is eliminated in
error state.
Table 4-149 PID. Block Input Parameters
 Loading...
Loading...