4. Configuration
212
Real sample time, in seconds, used for the
derivative action and MV limit rate calculus.
Real sample time from the last three cycles, in
seconds, used for the derivative action calculus.
Real sample time maximum value, in seconds,
since the PID block initialization.
Real sample time minimum value, in seconds,
since the PID block initialization.
Error code showed by the PID block. To
remove it, the problem must be solved and the
block restarted through the Restart variable.
The error codes are described below:
0: no error
1: MaxMV < MinMV
2: MaxPV < MinPV
3: PV > MaxPV
4: PV < MinPV
5: Ti < 0,001 s (with the integral action enabled)
6: Td < 0 s (with the derivative action enabled)
7: Gp ≤ 0
8: MaxVarMV < 0
9: DeadBand < 0
10: SampleTime < 0,001 s or SampleTime >
1000 s (with MeasureST = false)
Table 4-150 PID. Block Output Parameters
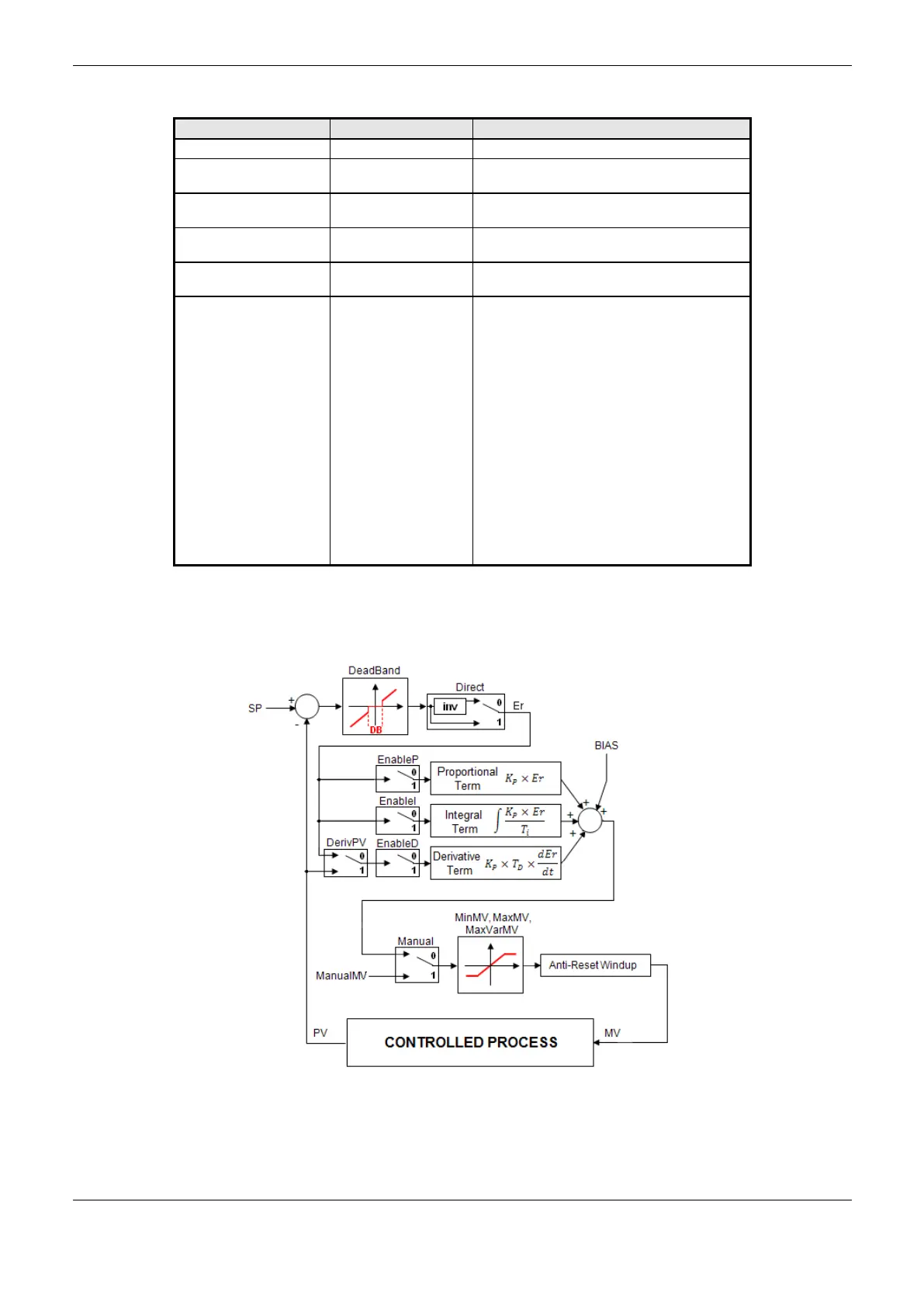
Figure 4-105 shows the block diagram of a PID loop, as the Nexto CPU execution.
Figure 4-105. PID Diagram
 Loading...
Loading...