AS64 series AC servo drive Function codes
-121-
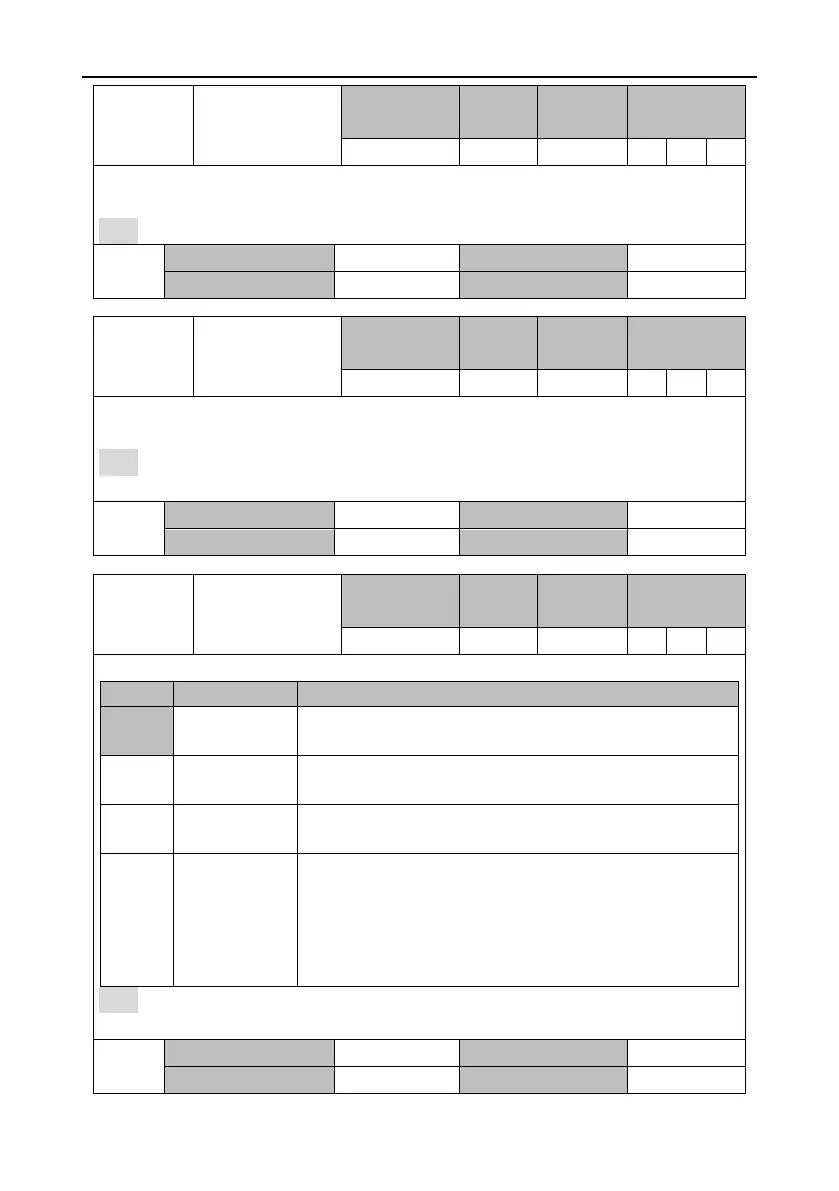
Switching level in
speed control
In speed control, if P2.27 is in the range of 3–5, the trigger of gain switching must be set. The unit
varies with the switching mode and associated settings.
Note: The level must be equal to the lag at least.
Switching lag in
speed control
In speed control, if P2.27 is in the range of 3–5, the trigger of gain switching must be set to
determine the lag. The unit varies with the switching mode and associated settings.
Note: If the level is set to be less than the lag, the setting is changed to the level being equal to
the lag during the actual use.
Switching trigger in
torque control
This parameter specifies the trigger of gain switching in torque control.
Gain parameters are fixed to the first gain parameters P2.00–
P2.04.
Gain parameters are fixed to the second gain parameters P2.05,
P2.06, P2.08, and P2.09.
With gain
switching input
The first gain is used if the gain switching input is invalid.
The second gain is used if the gain switching input is valid.
When the first gain is used, if the absolute value in the torque
command exceeds (level + lag) [0.1%], the first gain is switched to
the second gain.
When the second gain is used, if the absolute value in the torque
command does not reach (level − lag) [0.1%] and this state keeps
in the delay time, the second gain is switched to the first gain.
Note: This parameter is invalid for position gain, and in this case, the actual position gain is the
first gain always.