AS64 series AC servo drive Communication
-256-
8.3 CANopen
8.3.1 Protocol description
CANopen is a high-layer communication protocol structured over the Control Area Network (CAN). It
includes the communication profiles and device profiles for embedded systems. It is also an onsite
bus widely used in industrial control. Common CANopen devices and communication profiles are
defined in CAN in Automation (CiA) draft standard 301. Based on CiA 301, other profiles are
developed for special devices, such as CiA 402 for motion control.
8.3.2 Hardware configuration
For details on the pin definitions and functions of the CAN communication terminal CN3, see section
3.6 "Wiring for RS485/CAN terminal CN3".
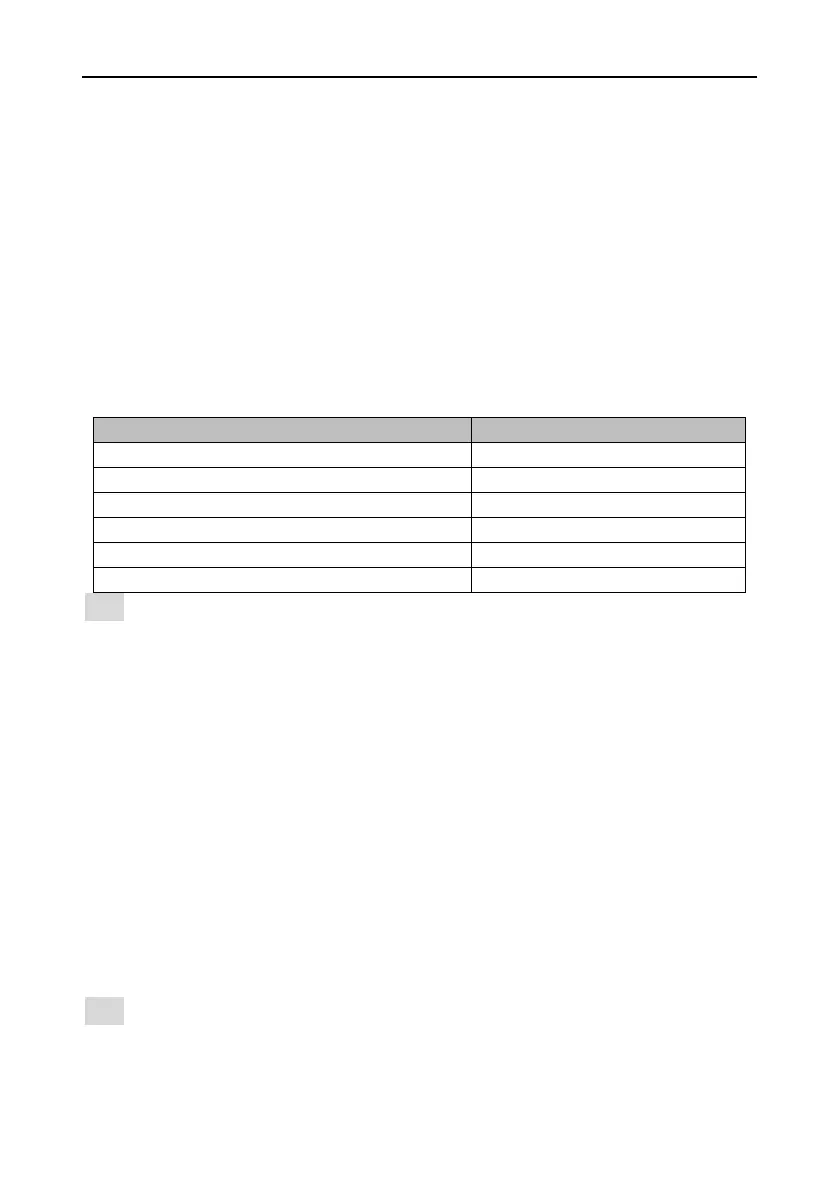
The following table lists the mapping between baud rates and maximum transmission lengths.
Note:
⚫ The CANL and CANH pins of all slave nodes can be directly connected in serial model, but not
star model.
⚫ A 120 ohms resistor must be connected between the master node and final node of the slave
node.
⚫ Shielded twisted pairs are recommended as CAN connection cables for anti-interference.
⚫ A longer connection cable indicates a higher requirement on CAN chip drive ability.
8.3.3 Software configuration
Before CANopen is enabled for AS64 servo drive, you must:
1. Set P0.03 [Control mode] to 7 [CANopen mode] on the LED panel or through DRIVE Studio.
2. Set P4.02 [CAN baud rate] on the LED panel or through Astraada DRIVE Studio.
P4.02 can be set to 0 (1 Mbps), 1 (500 kbps), 2 (250 kbps), 3 (125 kbps), 4 (50 kbps), or 5 (20 kbps).
3. Set P4.05 [CAN node no.] on the LED panel or through Astraada DRIVE Studio.
P4.05 can be set to an integer ranging from 1 to 127.
Note:
⚫ For all of the three parameters, you must repower the drive or perform soft reset for the parameter
modification to take effect.