AS64 series AC servo drive Overview
-2-
1.1 Servo drive
1.1.1 Drive introduction
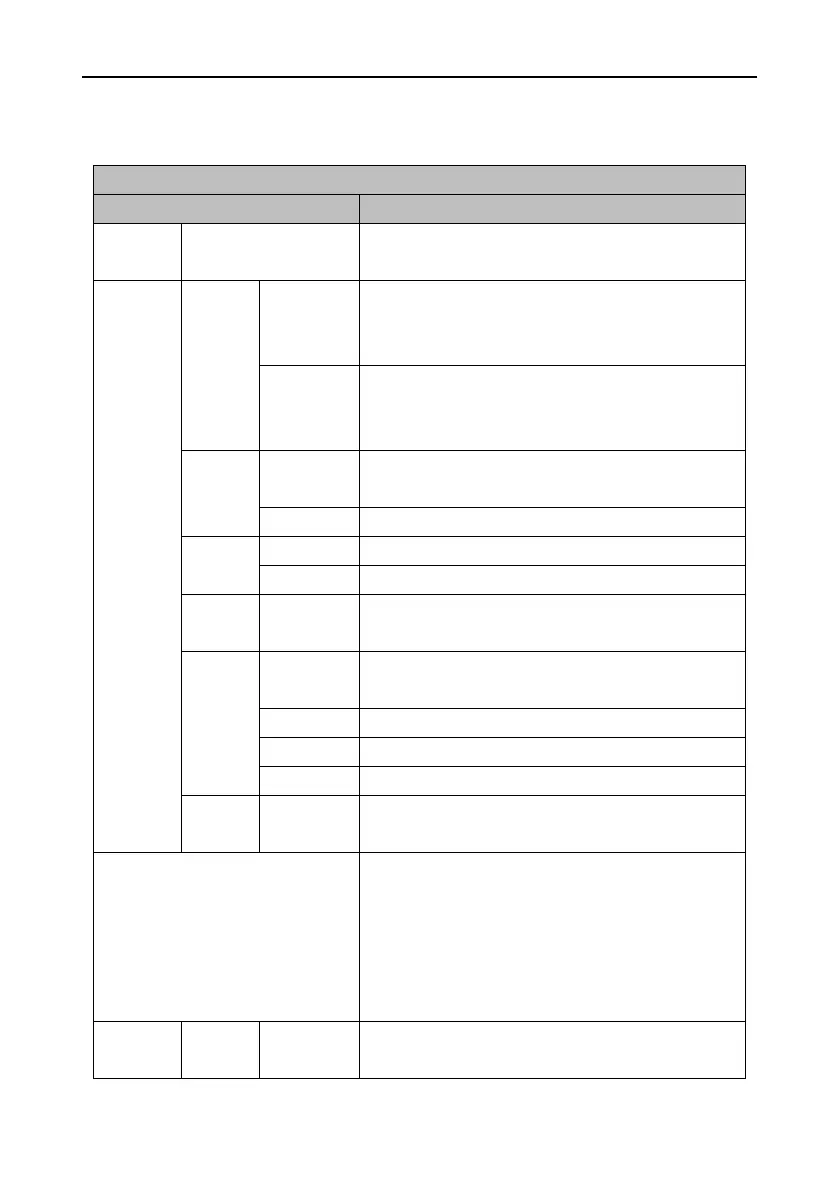
AS64 series servo drive (100W–2kW)
220V system input
voltage
1PH/3PH, AC 220V (±15%),47Hz–63Hz
8 inputs for the standard, pulse, and CANopen bus types;
7 inputs for the EtherCAT bus type (The function is
configurable through parameter settings.)
6 single-way outputs for the standard, pulse, and
CANopen bus types; 4 differential outputs for the
EtherCAT bus type
2 standard inputs (two 16-bit analog inputs);
2 other inputs (two 12-bit analog inputs)
1 group (of open collector input or differential input)
1 group of differential outputs (A+/A-; B+/B-; Z+/Z-)
Incremental encoder (or grating ruler) interface or serial
communication interface
1:1 communication upper computer software
(preconfigured)
1:n communication (preconfigured)
1:n communication (optional)
1:n communication (optional)
STO, conforming to the latest European safety standards
SIL3, (optional)
1: Position control 2: Speed control 3: Torque control
4: Switching between the position and speed modes
5: Switching between the speed and torque modes
6: Switching between the position and torque modes
7: Fully-closed loop control
8: CANopen mode 9: EtherCAT mode
1: Clearing residual pulses
2: Inhibiting command pulses