AS64 series AC servo drive Appendix
-314-
10.4 Fault codes
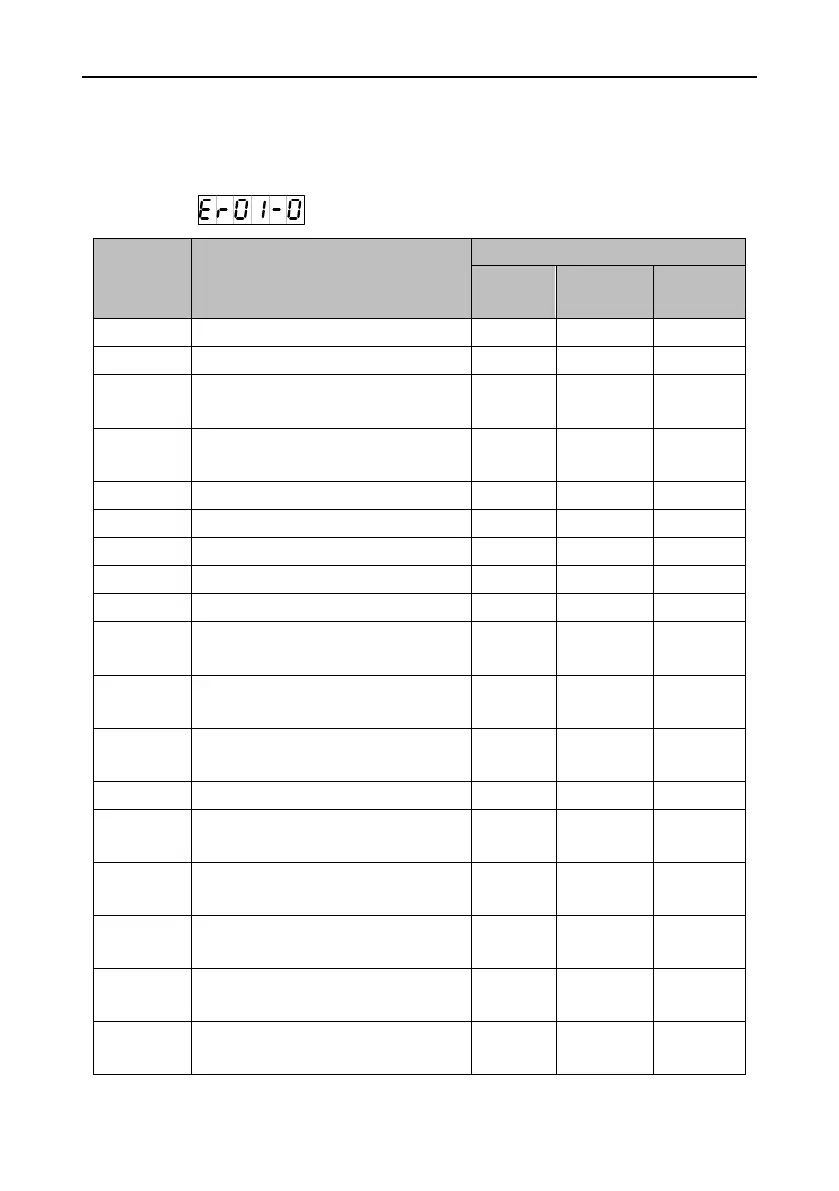
A fault code is displayed in the format of ErXX-X, in which XX indicates the main code and X
indicates the sub code.
For example, in , 01 indicates the main code and 0 indicates the sub code.
Encoder fault–Encoder communication
exception
Encoder fault–Encoder feedback
deviation too large
Encoder fault– Parity error
Encoder fault–Frame error
Encoder fault–Short frame error
Encoder fault–Encoder exception
Encoder fault–Second-encoder
timeout
Encoder fault–Encoder battery low-
voltage alarm
Encoder fault–Encoder battery
undervoltage
Encoder fault–Encoder overheating
Encoder fault–Encoder EEPROM
writing error
Encoder fault–No data in encoder
EEPROM
Encoder fault–Encoder EEPROM data
check error
Current sensor fault–Phase-U current
sensor fault
Current sensor fault–Phase-V current
sensor fault