AS64 series AC servo drive Function codes
-140-
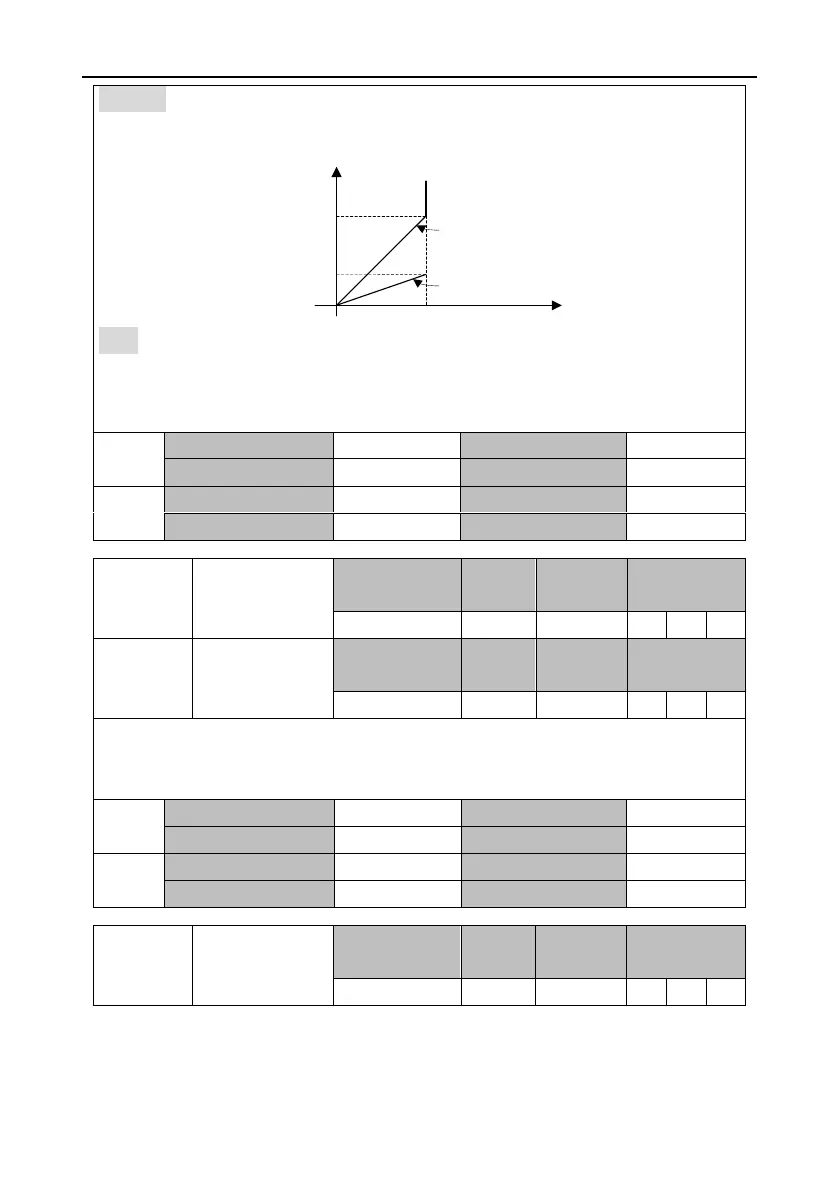
Example: Assume that the actual speed is output from the terminal AO1, 10V corresponds to the
speed of 3000 r/min and 0V corresponds to 0. Then P3.30 must be 1 and P3.31must be 300. See
the following figure for the relationship between the actual speed reference and output voltage:
10.00V
3000r/min
AO1 output voltage (V)
Speed (r/min)
P3.31=300
P3.31=100
1000r/min
Note:
⚫ In the example, when the actual output speed is 3000 r/min or above, the output voltage of AO1
is always 10V. Select proper gain according to the actual situation.
⚫ If other functions are set for P3.30 and P3.32, the gain setting method is similar.
This group of parameter is used to adjust voltage of analog output 1 and analog output 2.
Actual value of analog output voltage = Original value of analog output voltage + Offset value of
analog output voltage