CTH200 Series PLC User Manual
a. Set an appropriate acceleration to limit the acceleration of each instruction on an axis.
Such as PTP instruction, set AXIS_NO=0, MIN_SPEED=1000, MAX_SPEED=11000, TA=500,
then in theory the acceleration of PTP motion is 20HZ/ms (= (MAX_SPEED-MIN_SPEED)/TA); if
0 axis call MC_SET_MAX_ACCELE and set maximum acceleration 15HZ/ms, the PTP actual
acceleration is 15HZ/ms (the same for MC_LINE_R and MC_CIRCLE_R)
b. An instruction on a certain axis is to obtain the maximum acceleration to run
If the PTP instruction run at the maximum acceleration, call MC_SET_MAX_ACCELE instruction
on the coaxes to set the maximum acceleration (the parameter TA of MC_SET_MAX_ACCELE
instruction cannot be 0, otherwise cannot obtain the maximum acceleration), and simultaneously
set the parameter TA of PTP instruction to 0.
If the maximum acceleration is not set and the PTP instruction TA=0, the alarm parameter fails
on the PTP instruction. (Same for MC_LINE_R and MC_CIRCLE_R)
1. For the biaxial instructions MC_LINE_R and MC_CIRCLE_R, if both set the
maximum acceleration, the smaller one will be taken as the maximum acceleration of
the biaxial system. If only one axis is set with the maximum acceleration, then take it as
the maximum acceleration of the biaxial system. If the maximum acceleration is not set
on both axes, the biaxial system has no limitation for acceleration.
2. After MAX_SPEED, TA, AXIS_NO have been determined, give SET a rising edge, so
these parameters are updated and effective.
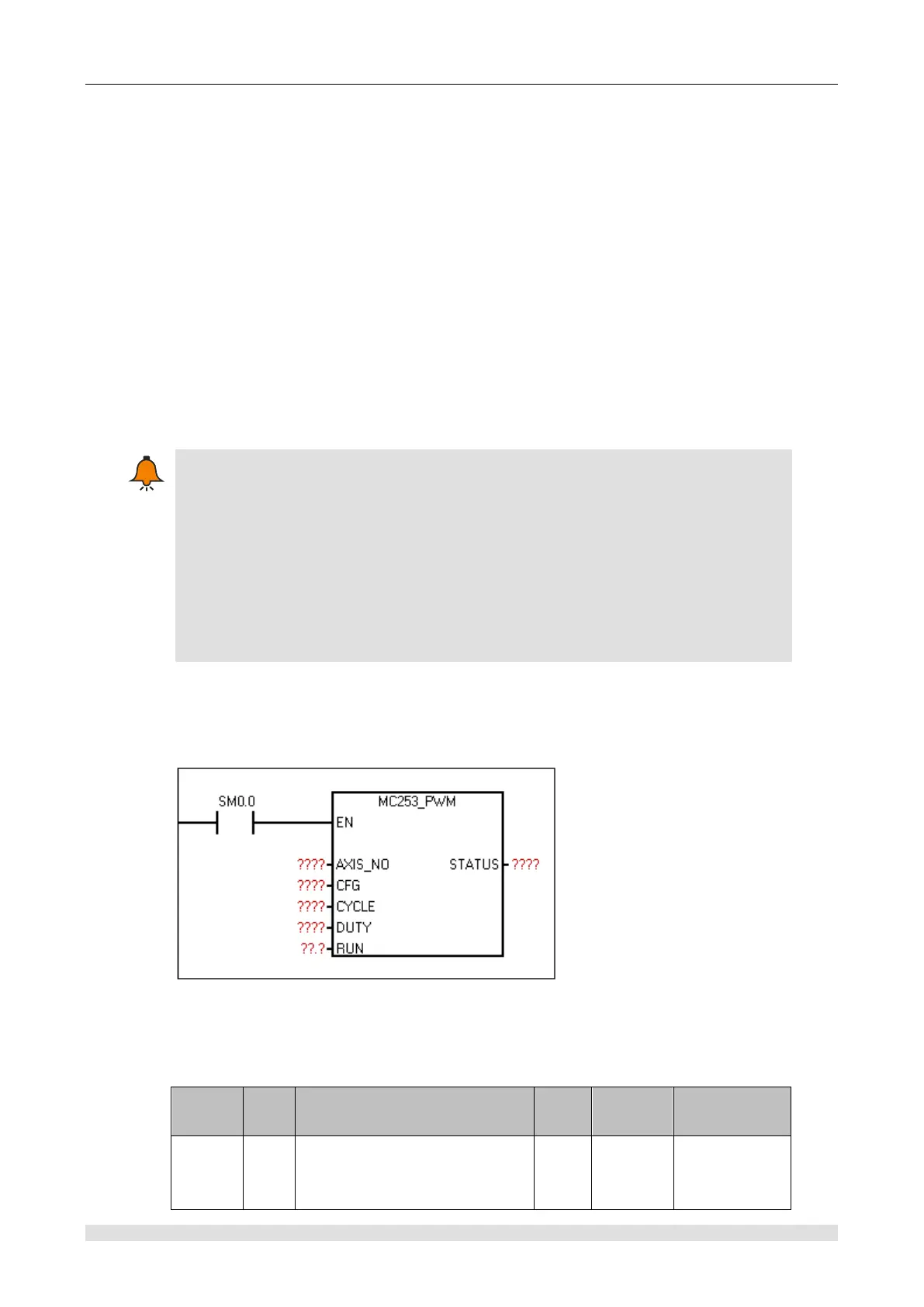
PWM instruction
① Function name: MC253_PWM
② Function: Output different period pulse and duty ratios by setting cycle and duty ratio
parameters.
③
Parameter
Set axis number(2 axes for each
EM253 module, axis number
range decided by motion control
Unmodifiable
in the process