Dobot M1 User Guide 2 Introduction
Issue V1.3.4 (2019-05-23) User Guide Copyright © Yuejiang Technology Co., Ltd
14
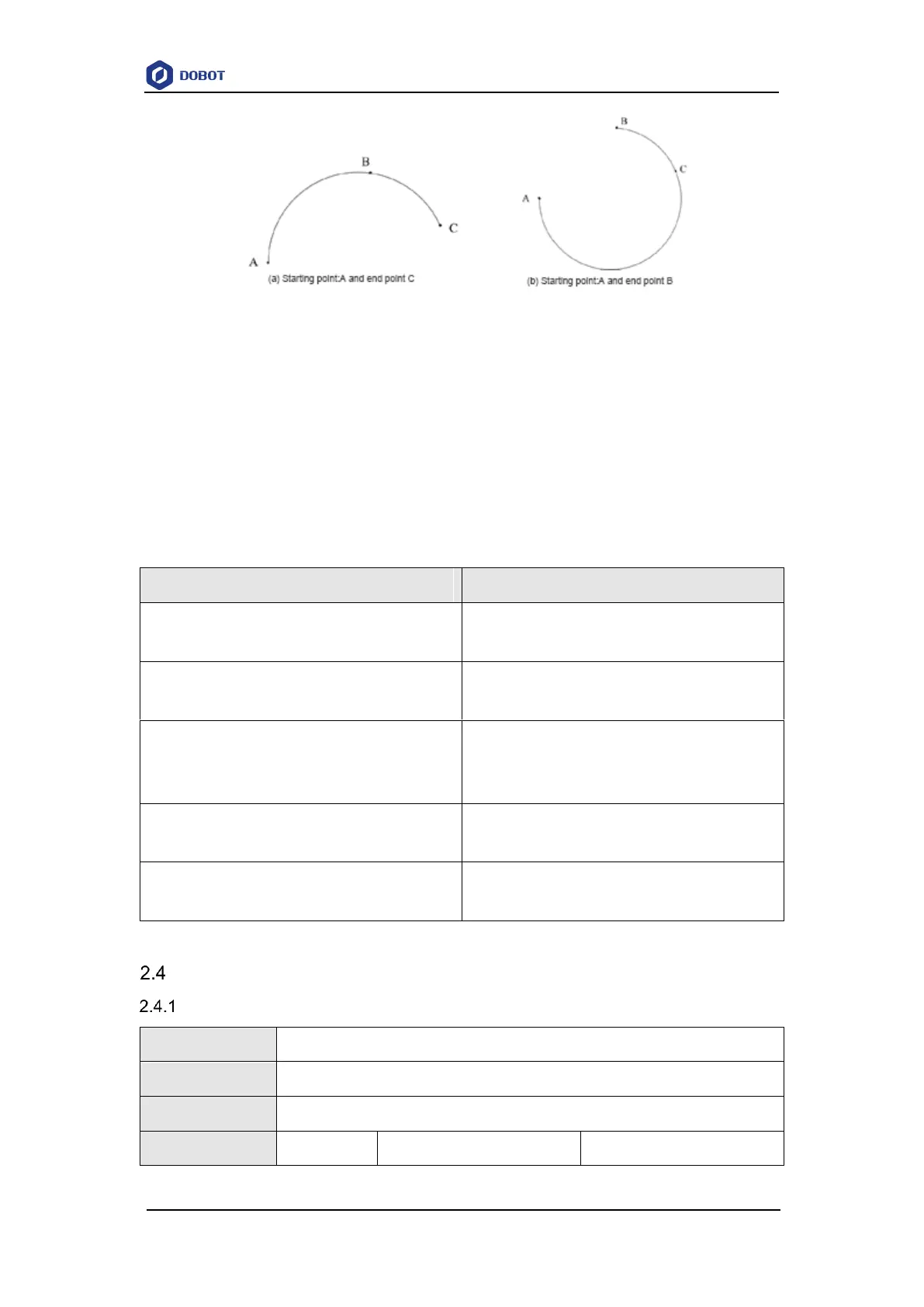
Figure 2.9 ARC mode
2.3.4.4 CIRCLE Mode (CIRCLE)
The CIRCLE mode is similar to the ARC mode and its trajectory is a circle. In the CIRCLE
mode, it is necessary to confirm the starting point with other motion modes.
2.3.4.5 Application Scenarios
The application scenario depends on the trajectory in motion mode, as shown in Table 2.1.
Table 2.1 Application scenario
If the trajectory of playback is required as a
straight line, you can choose MOVL
If the trajectory of playback is not required but
high speed is required, you can choose MOVJ
If the movement of two points is required to lift
upwards by amount of height, such as sucking
up, grabbing, you can choose JUMP
If the trajectory of playback is required as an
arc, such as dispensing, you can choose ARC
If the trajectory of playback is required as a
circle you can choose CIRCLE
Technical Specifications
Technical Parameters