Maintenance 7. Verifying Robot System Operation
RC180 Rev.17
7. Verifying Robot System Operation
When maintenance has been performed for either the Manipulator or the Controller,
including replacing any parts in those units, items must be checked according to the
procedures in this section to ensure proper operation.
(1) Connect all the necessary cables for the system.
WARNING
■
When verifying the robot system operation, prepare for failures with initial settings
or wiring. If the Manipulator operates abnormally because of incorrect initial
settings or wiring, press the Emergency Stop switch immediately to stop the
Manipulator.
Verify the robot system operation in the restricted mode (low speeds and low
power) status. Verifying the robot system operation at high speeds may damage
the robot system and/or cause serious safety problems as the Manipulator cannot
stop operating immediately in case of abnormal operation of the Manipulator.
The serial number of the Manipulator that should be connected is indicated on
the
Connection Check Label on the Controller. Connect the Controller and the
per connection between the Controller and the
Manipulator may cause not only improper function of the robot system but also
serious safety problems.
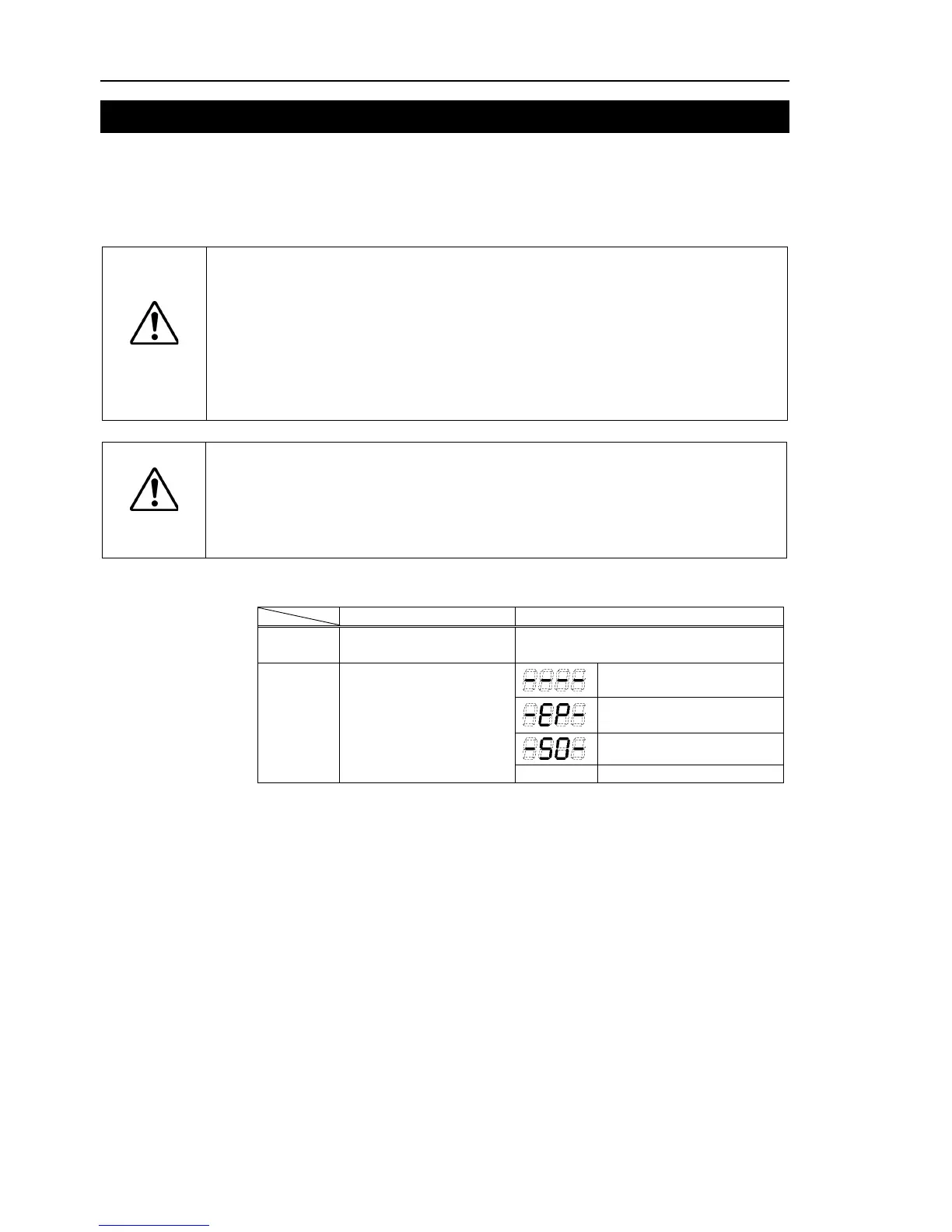
(2) Turn ON the Controller. The Controller will boot up. During this process, watch
and monitor the LED status as described in the following list:
LED for current operation mode
(TEACH, AUTO, PROGRAM) turns ON.
7 segment All lights out
READY (Normal)
Emergency Stop
For details of the display, refer to Maintenance 2.3 LED and Seven-segment LED.
For error number, refer to Maintenance 8.1 Error Code Table.
(3) Execute MOTOR ON and check the following:
- No error is displayed.
- There is servo excitation and the Manipulator operates normally.
(4) Execute various motion commands (such as JUMP, etc.). The Manipulator must
operate accordingly and normally without vibration or unusual sounds.