Setup & Operation 11. I/O Remote Settings
68 RC180 Rev.17
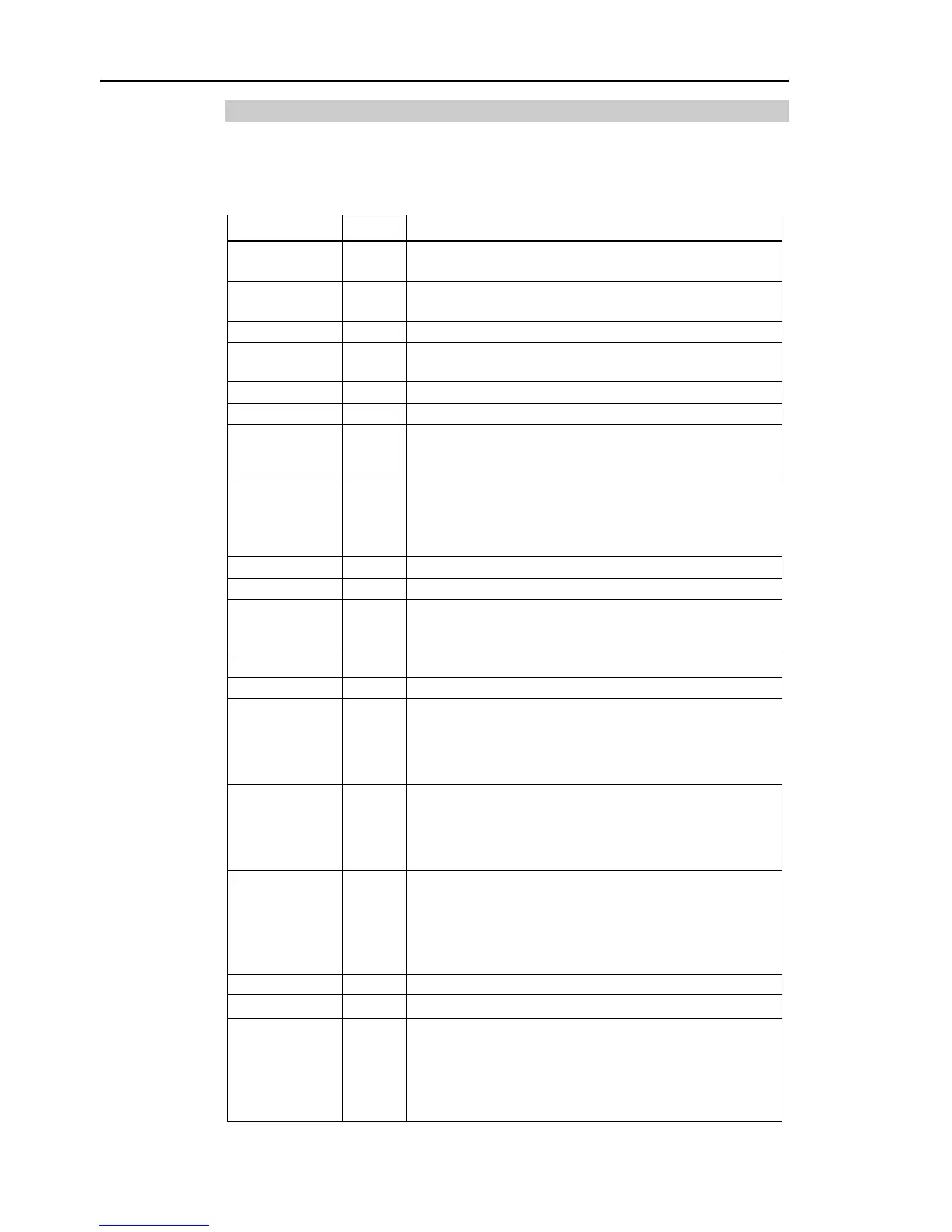
11.1.2 Remote Output Signals
Remote outputs provide status for the Manipulator and Controller.
Remote outputs provide the assigned function using with any control device. The outputs
execute automatically. Therefore, no special programming is needed.
Turns ON when the controller startup completes and no
task is running.
Running 1
Turns ON when task is running.
However, turns OFF when “Paused output” is OFF.
Turns ON when pause task exists.
Turns ON when an error occurs.
Use “Reset input” to recover from the error.
Turns ON at Emergency Stop.
Turns ON when the safeguard is open.
Turns ON when critical error occurs.
When a critical error occurs, “Reset input”
function. Reboot the controller to recover.
Warnig 7
Turns ON when warning occurs.
The task runs as normal with the warning. However, be
sure to eliminate the caus
e of the warning as soon as
Turns ON when the motor is ON.
Turns ON when the robot is in the home position.
Indicates the running or the last main function number (*1)
Turns ON in remote input acceptable status. (*2)
Indicates the error number.
Turns ON when the robot is in the approach check area.
For details, refer to EPSON RC+ 5.0 Online Help or Box
in SPEL
+
Language Reference.
Turns ON when the robot is in the approach check plane.
For details, refer to EPSON RC+ 5.0 Online Help or
Plane in SPEL
+
Language Reference.
Turns ON when any of the alarms is occurring. (*5)
Turns ON when the power status is High.
Output signal for alive monitoring of the controller. The
signal input by ALIVE input will be output. The master
equipment can perform alive monitoring of the controller
by switching the input periodically and checking the
output signal.