6 Positioning mode
Festo – GDCP-CMMS/D-FW-EN – 1404NH – Engli sh 113
6.2 R ecord selection and positioning records
6.2.1 Function: Record selection and positioning records
In the motor controller, positioning records can be c onfigured to control point-to-point positioning with
trapezoidal velocity curve. The positioning records are selected via record selection “0…63” and they
can be controlled in the individual record/record linking/homing/jog mode via the control data of the
active fieldbus (CANopen/PROFIBUS DP/DeviceNet) or the record selection bit 0…5 of the digital in-
puts. The positioning records “0…63” are permanently assigned to the record selection “0…63”. The
positioning record “0” is reserved for homing. The positioning records “1…63” can be used for the indi-
vidual record/record linking/teach mode page 114. A profile ( 0…8) in the positioning record profile
is to be assigned to each parameterised positioning record (1…63) page 120. Several individual
records in the positioning record list can be linked to a record sequence via the record linking function.
The selected positioning record can be activated with the star t command ( c ontrol data or DIN8). From
the parameters, the controller-internal positioning controller calculates the corresponding positioning
curve for the individual record/record linking/homing mode.
In the Festo Configuration Tool (FCT), the individual record/record linking mode can be parameterised
via the parameters “positioning record list/positioning record profiles” and the homing mode can be
parameterised via the “homing” parameters.
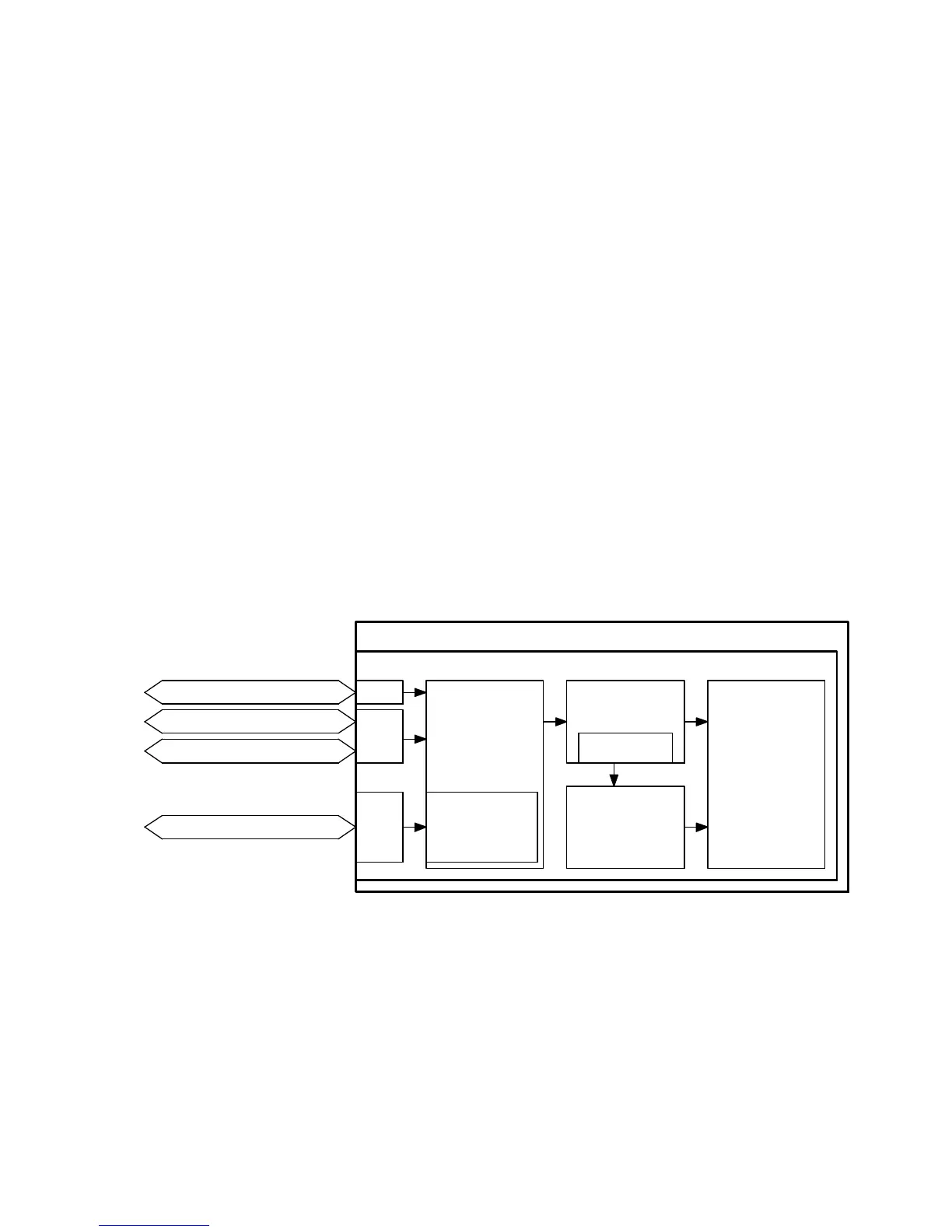
Activating record selection (positioning record) via fieldbus or digital inputs
X4
CMMS/CMMD
CANOpen
PROFIBUS DP
Digital inputs
Fieldbus
Control section
X1
X1.1
X1.2
EXT
EXT1
DeviceNet
Inputs
Record
selection:
0…63
Positioning
record: 0… 63
Position record
profile: 0…7
Bit 0…5
Controller-
internal
positioning
control
Profile
Fig. 6.2 Overview: Activating record selection (positioning rec ord) via fieldbus or digital inputs
 Loading...
Loading...









