6 Positioning mode
Festo – GDCP-CMMS/D-FW-EN – 1404NH – Engli sh 117
6.4.3 Parameterising the direct mode
The f ollowing parameters (FCT) can be parameterised for the direct mode:
Parameters : Position, acceleration, deceleration, base value of s peed
and smoothing
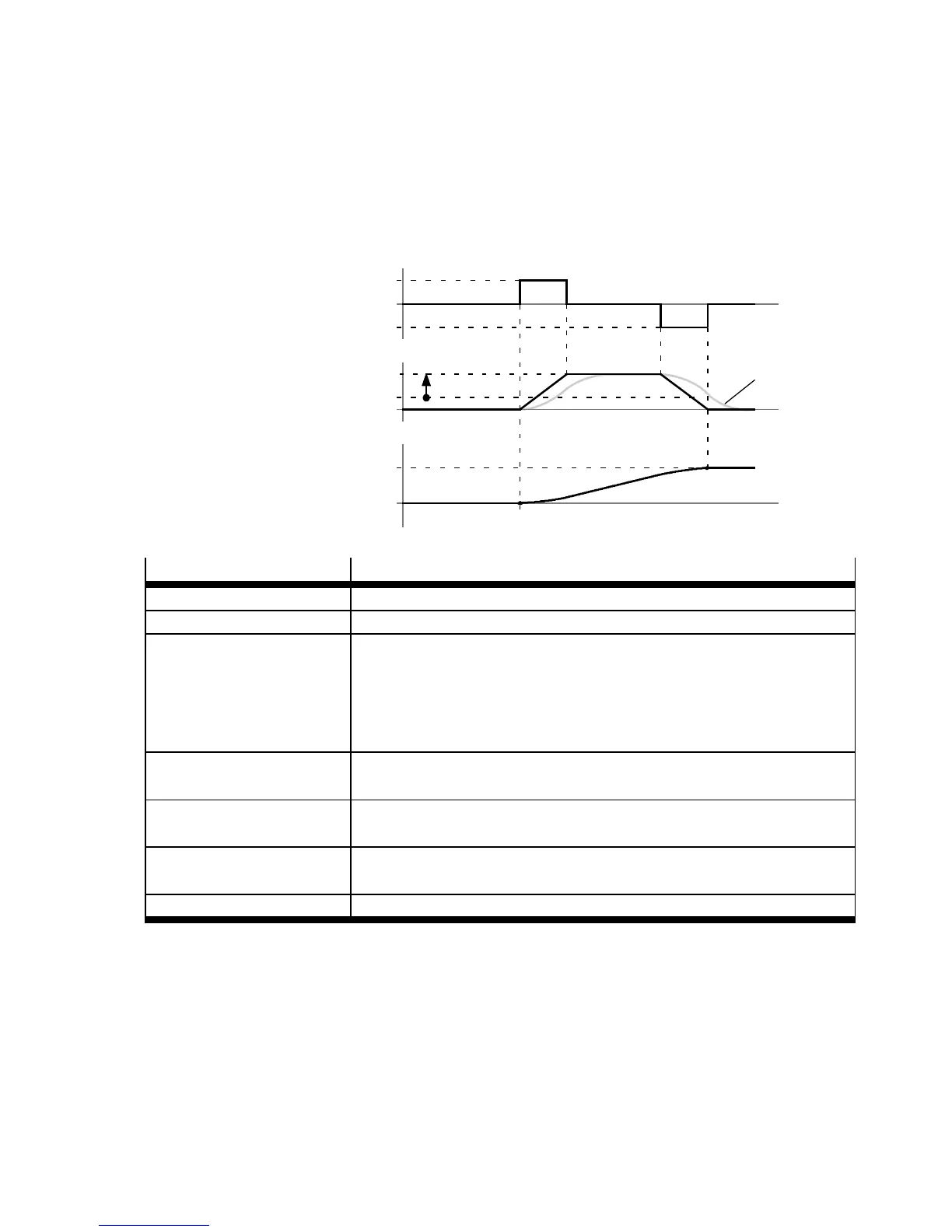
The diagram shows the parameters for point-to-point positioning and the “smoothing” option.
t
t
a+
a–
v
B
v
N
k
v
t
s
Pos
k
a
Start
Parameter Description
a+ Acceleration Setpoint value for acceleration.
a– Deceleration Setpoint value for deceleration.
v
N
Velocity – Device profile FHPP:
The setpoint value is calculated by multiplying the base value of
velocity v
B
and the percentage value of velocity k
v
.
– Device profile CiA 402:
Setpoint value
1)
for speed.
v
B
Base value of velocity – Device profile FHPP:
Base value for calculating velocity v
n
.
k
v
Percentage value of
velocity
– Device profile FHPP:
Percentage value
1)
for calculating velocity v
n
.
k
a
Smooth Value for duration of filtering from acceleration and deceleration ramp
page 130.
Pos Position Setpoint value
1)
for the relative or absolute position.
1) The value and the unit is set in the cyclic data of the control system.
Tab. 6.2 Parameters: Position, acceleration, deceleration, velocity, base value of veloc ity and
smoothing
 Loading...
Loading...









