6 Positioning mode
Festo – GDCP-CMMS/D-FW-EN – 1404NH – Engli sh 129
Parameter example: Smoothing (jerk filter)
The progression of the parameterised ac c eleration (a+)/deceleration (a–) can be altered with smooth-
ing (jerk filter).
If smoothing is “100 %”, the acc eleration/deceleration ramps are filtered with the maximum filter time
t
fi
“50 ms”. The drive is moved with the filtered acc eleration/dec eleration, and the least stresses oc cur
for the drive mechanics. The parameterised velocity (v
N
) and the position are reached with a time delay.
If smoothing is “0 %”, the smoothing function is deactivated and the acceleration/dec eleration ramps
are not filtered. The drive is moved with the parameterised acceleration/deceleration, and the highest
stresses oc c ur for the drive mechanic s. The parameterised veloc ity ( v
N
) and the position are reached in
the shor test amount of time.
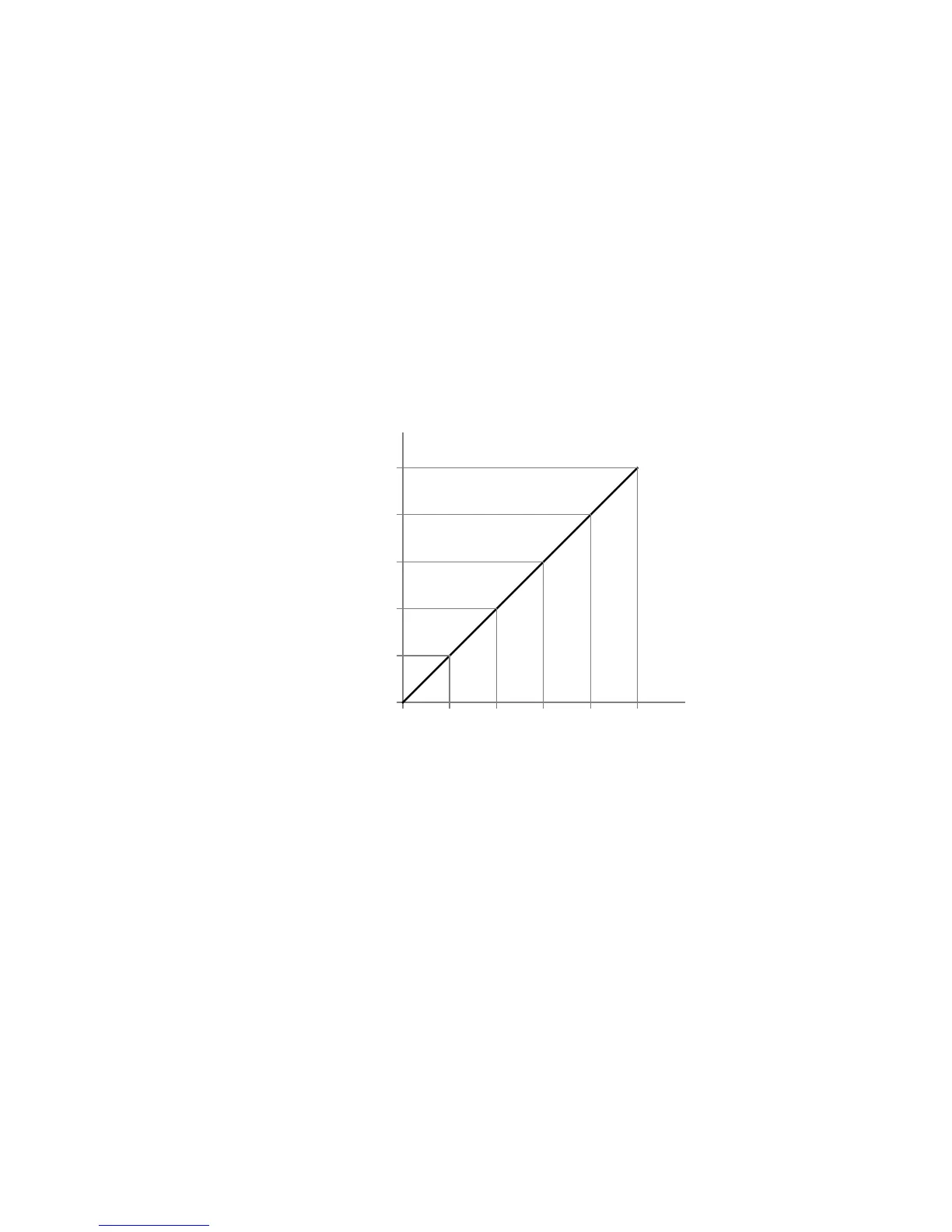
Diagram: Filter time t
fi
as a function of smoothing
Smoothing [%]
Filter time t
fi
[ms]
20
80
60
40
100
10 20 30 40 50
Fig. 6.10 Diagram: Filter time t
fi
as a function of smoothing
 Loading...
Loading...









