4.1 Test Run
4-18
4.1.10 Basic settings of function codes < 5 >
When driving a Fuji general-purpose motor under "V/f control with speed sensor (F42
*
= 3)" or "dynamic
torque vector control with speed sensor (F42
*
= 4)," the following basic function codes should be set.
Select Fuji standard 8- or 6-series motors with the function code P99
*
.
Configure the function codes listed below according to the motor ratings and your machinery design values.
For the motor ratings, check the ratings printed on the motor's nameplate. For your machinery design
values, ask system designers about them.
For details on how to modify the function code data, see Chapter 3, Section 3.4.2 "Setting up function
codes Menu #1 “Data Setting”."
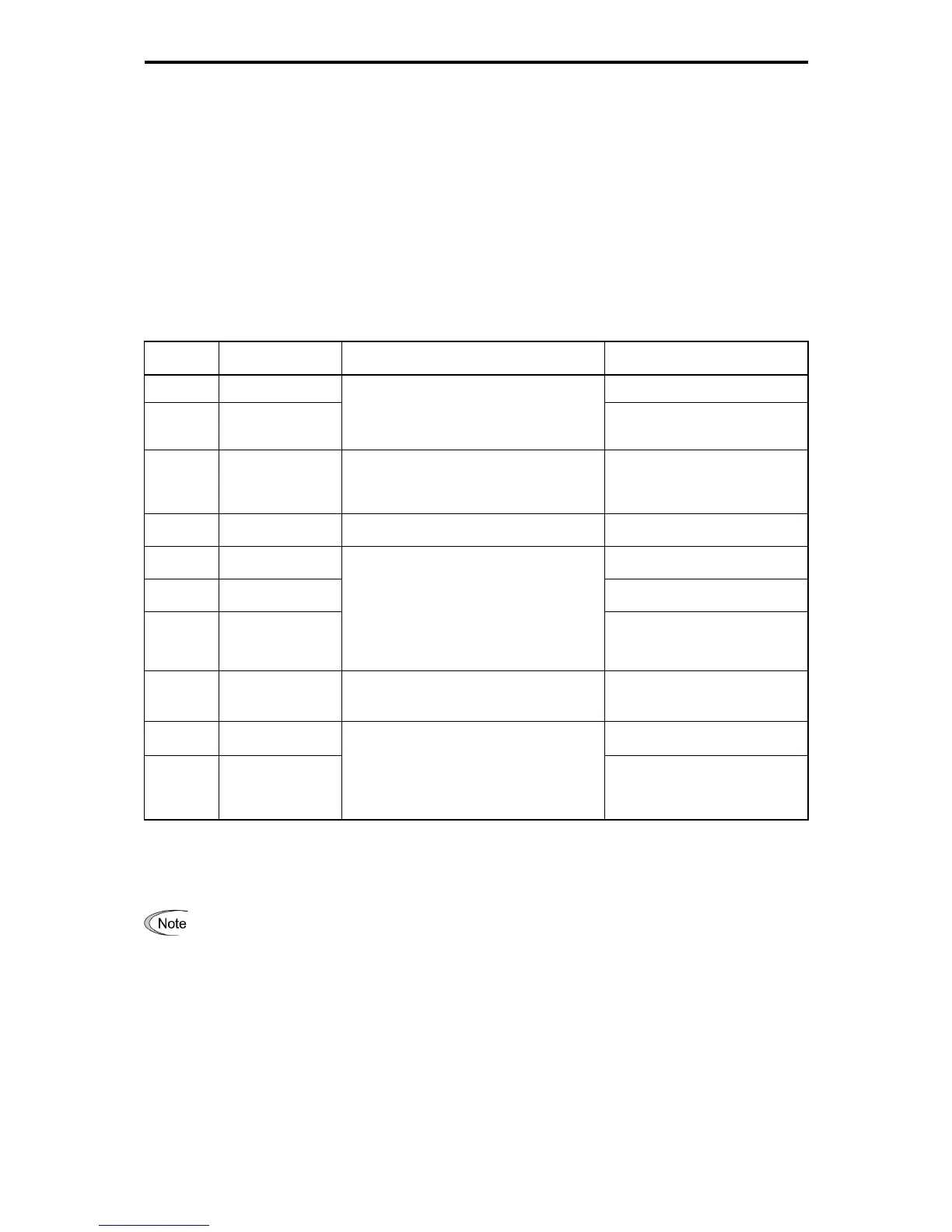
Table 4.1-15
Function
Code
Name Function code data Factory default
f 04
*
Base frequency 1
50.0 (Hz)
f 05
*
Rated voltage at
base frequency 1
Motor ratings (printed on the nameplate of
the motor)
Three-phase 200 V: 200 (V)
Three-phase 400 V: 400 (V)
f 99
*
Motor 1 selection
0: Motor characteristics 0 (Fuji standard
motors, 8-series)
3: Motor characteristics 3 (Fuji standard
motors, 6-series)
0: Motor characteristics 0
(Fuji standard motors,
8-series)
p 02
*
Motor 1
(Rated capacity)
Capacity of motor connected
Nominal applied motor capacity
f 03
*
Maximum
frequency 1
60.0 (Hz)
f 07
Acceleration time
1
(Note)
22 kW or less: 6.00 (s)
30 kW or more: 20.00 (s)
f 08
Deceleration time
1
(Note)
Machinery design values
(Note)
For a test-driving of the motor,
increase values so that they are
longer than your machinery design
values.
If the specified time is short, the
inverter may not run the motor
properly.
22 kW or less: 6.00 (s)
30 kW or more: 20.00 (s)
d 15
Feedback encoder
pulse resolution
Pulse resolution of the target motor
encoder
0400 HEX/1024 P/R
0400 HEX
d 16
Feedback pulse
correction factor 1
1
d 17
Feedback pulse
correction factor
2
Set the deceleration rate between the
motor and encoder.
Motor speed = Encoder speed x
(d17)/(d16)
1
After the above configuration, initialize motor 1 with the function code (H03 = 2). It automatically updates the
function codes P01
*
, P03
*
, and P06
*
to P23
*
, P53
*
to P56
*
, and H46 for the required motor parameters.
Be very careful when changing the P02
*
data because doing so automatically updates the data of the
function codes P03
*
, P06
*
to P23
*
, P53
*
to P56
*
, and H46.
The motor rating should be specified properly when performing auto-torque boost, torque calculation
monitoring, auto energy saving, torque limiting, automatic deceleration (anti-regenerative control), auto
search for idling motor speed, slip compensation, torque vector control, droop control, or overload stop.
In any of the following cases, the full control performance may not be obtained from the inverter because
the motor parameters differ from the factory defaults, so perform auto-tuning.
• The motor to be driven is not a Fuji product or is a non-standard product.
• The wiring distance between the inverter and the motor is too long (generally 20 m or more).
• A reactor is inserted between the inverter and the motor.

 Loading...
Loading...








