5.4 Details of Function Codes
5-235
Chapter 5 Function Code
Details of
Function Codes
F codes
E codes
C codes
P codes
H codes
A codes
b codes
r codes
J97 to J99
d01 to d28
U codes
y codes
5.4.8 d codes (Application functions 2)
d01 to d04
d06
Speed Control 1 (Speed Command Filter, Speed Detect Filter, P (Gain), I (Integral Time))
Speed Control 1 (Output Filter)
This function adjusts the speed control system under normal operations.
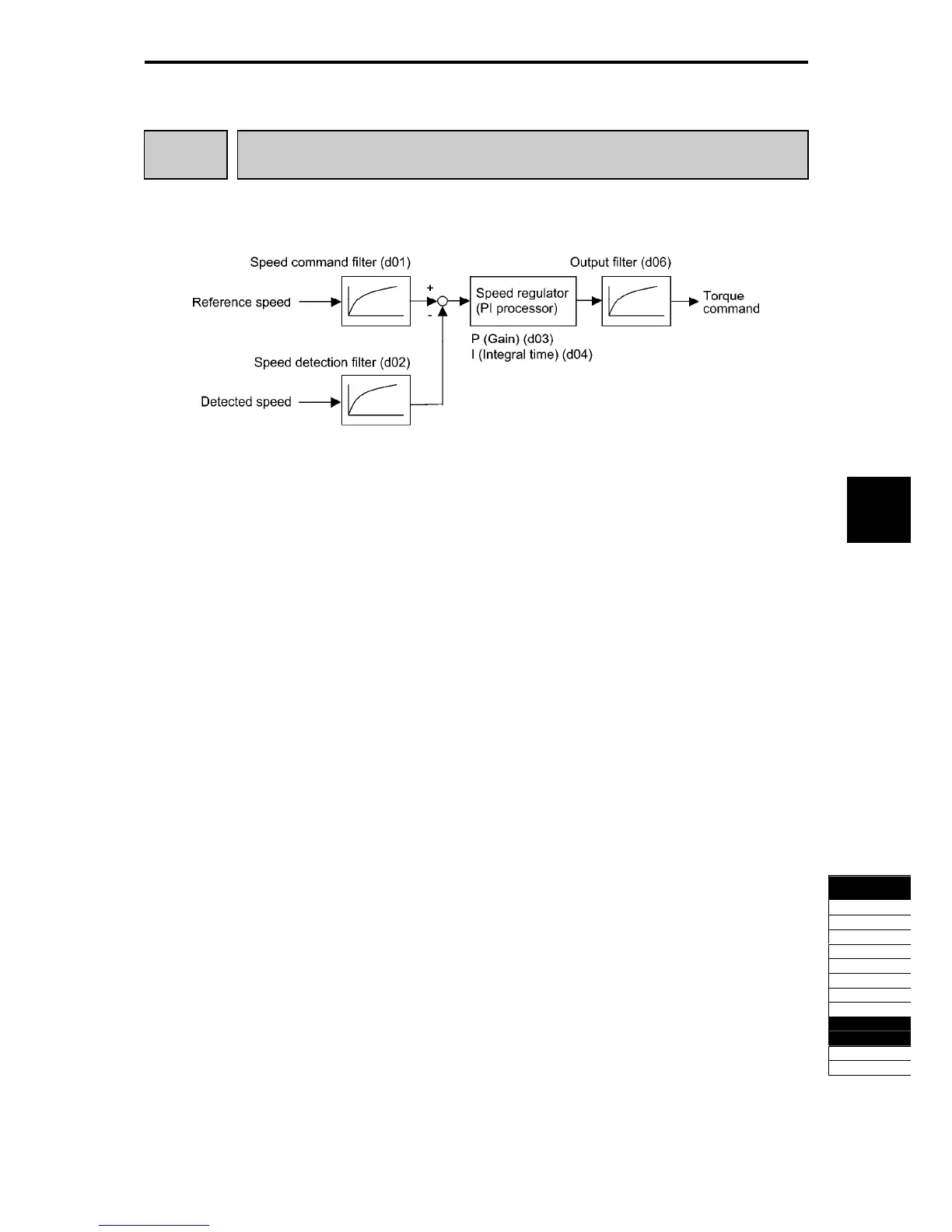
Block diagram of the speed control sequence
Fig. 5.4-118
Speed command filter (d01)
d01 sets a time constant of the primary delay filter to the speed set value.
- Data setting range: 0.000 to 5.000 (s)
Adjust this data when an excessive overshoot occurs against the change of the speed setting.
When the filter time constant is increased, the speed command value stabilizes, and the overshoot to the
speed setting change decreases, and the speed response delays.
Speed detection filter (d02)
d02 specifies a time constant determining the primary delay of the speed detection filter.
- Data setting range: 0.000 to 0.100 (s)
Adjust this data when the control target (machinery) is oscillatory due to deflection of a drive belt or other
causes so that ripples (oscillatory components) are superimposed on the detected speed, causing hunting
(undesirable oscillation of the system) and blocking the PI controller gain from increasing (resulting in a slow
response speed of the inverter). In addition, set this value when the encoder pulse number is small, and
when the speed makes the system oscillatory.
When the filter time constant is increased, the speed detect value stabilizes. Therefore, the PI controller gain
can be increased even when the ripples superimpose on the detected speed. However, speed detection
itself delays, resulting in a slower speed response, larger overshoot, or hunting.
P (gain) (d03), I (integral time) (d04)
This function sets the gain and the integral time for the speed controller (ASR).
By setting d04 = 999, the configuration of the speed controller (ASR) can be changed from the PI controller
to the P controller for invalidating the integration operation.
- Data setting range: d03 = 0.1 to 200.0 (multiply)
d04 = 0.001 to 9.999 (s)
999 (Integral operation invalid)

 Loading...
Loading...








