4.1 Test Run
4-23
Chapter 4 OPERATION
<Modification of motor control function code data>
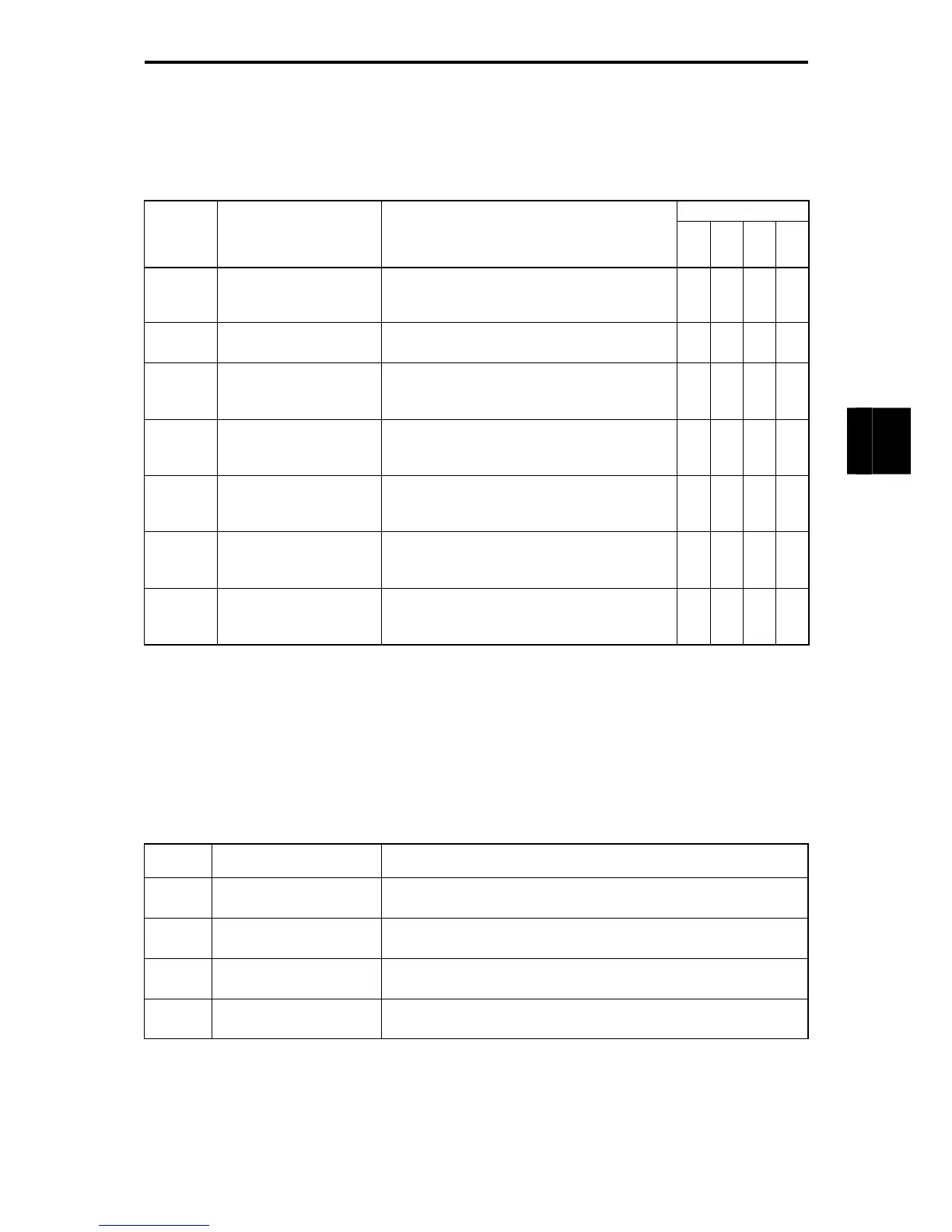
Modifying the current function code data sometimes can solve an insufficient torque or overcurrent incident.
The table below lists the major function codes to be accessed. For details, see Chapter 5 "FUNCTION
CODES" and Chapter 6 "TROUBLESHOOTING."
Table 4.1-19
Drive control
Function
code
Name Modification key points
V/f
PG
V/f
w/o
PG
w/
PG
f 07
Acceleration time 1
If the current limiter is activated due to a short
acceleration time and large drive current,
prolong the acceleration time.
| | | |
f 08
Deceleration time 1
If an overvoltage trip occurs due to a short
deceleration time, prolong the deceleration time.
| | | |
f
09
*
Torque boost 1
If the starting motor torque is deficient, increase
the torque boost. If the motor with no load is
overexcited, decrease the torque boost.
| | ××
f 44
Current limiter
(Mode selection)
If the stall prevention function is activated by the
current limiter during acceleration or
deceleration, increase the operation level.
| | ××
p
09
*
Motor 1
(Slip compensation gain
for driving)
For excessive slip compensation during driving,
decrease the gain; for insufficient one, increase
the gain.
| × | ×
p 11
*
Motor 1
(Slip compensation gain
for braking)
For excessive slip compensation during braking,
decrease the gain; for insufficient one, increase
the gain.
| × | ×
h
80
*
Output current fluctuation
damping gain 1
(For motor 1)
If the motor vibrates due to current fluctuation,
increase the suppression gain.
| | ××
|: Modification effective ×: Modification ineffective
If modification of motor control function code data does not resolve a problem under V/f control with speed
sensor, dynamic torque vector control with speed sensor, vector control without speed sensor, or vector
control with speed sensor, modify the function codes listed below.
A PI controller is used to control speed in drive control above. The PI parameters may require modification
due to inertia on the load side. The main function codes requiring modification are listed below. For details,
see Chapter 5 "FUNCTION CODES" and Chapter 6 "TROUBLESHOOTING."
Table 4.1-20
Function
Code
Name Modification key points
d 01
*
Speed control 1
(speed command filter)
If the overshoot is too large over changes of the speed command,
increase the filter constant value.
d 02
*
Speed control 1
(speed detection filter)
If the speed control gain cannot be increased due to a ripple during
speed detection, increase the filter constant value to increase the gain.
d 03
*
Speed control 1 P
(gain)
Decrease the gain when the speed hunting occurs. Increase the gain if
the response is too slow.
d 04
*
Speed control 1 I
(integration time)
Shorten the integration time if the response is too slow.

 Loading...
Loading...








