5.4 Details of Function Codes
5-237
Chapter 5 Function Code
Details of
Function Codes
F codes
E codes
C codes
P codes
H codes
A codes
b codes
r codes
U codes
d01 to d06
U codes
y codes
d05
Speed Control 1 (Feed Forward Gain)
Related Function Codes: A47, b47, r47 Speed Control 2 to 4
(Feed Forward Gain)
This function executes the feed forward control that directly adds the torque determined by the speed
command change value to the torque command.
The speed controller PI control is the feedback control. It executes the corrective action (to follow the speed
command) according to the result of objective for the control (actual speed). Therefore, this control can be
used for correction of factors that cannot directly measure, such as the unmeasurable disturbance and
uncertainness of the measurement. However, it leads the follow-up correction that corrects the change of
known command order after the change appears to the deviation (speed command - actual speed value).
The operation amount (torque command) for the known factor can be acquired in advance. Therefore,
control with more readiness will be available when the acquired operation amount is added to the torque
command. This is the function code that executes the following operation. This feed forward control directly
adds the torque determined by the speed command change value to the torque command.
Setting range: 0.00 to 99.99 [s]
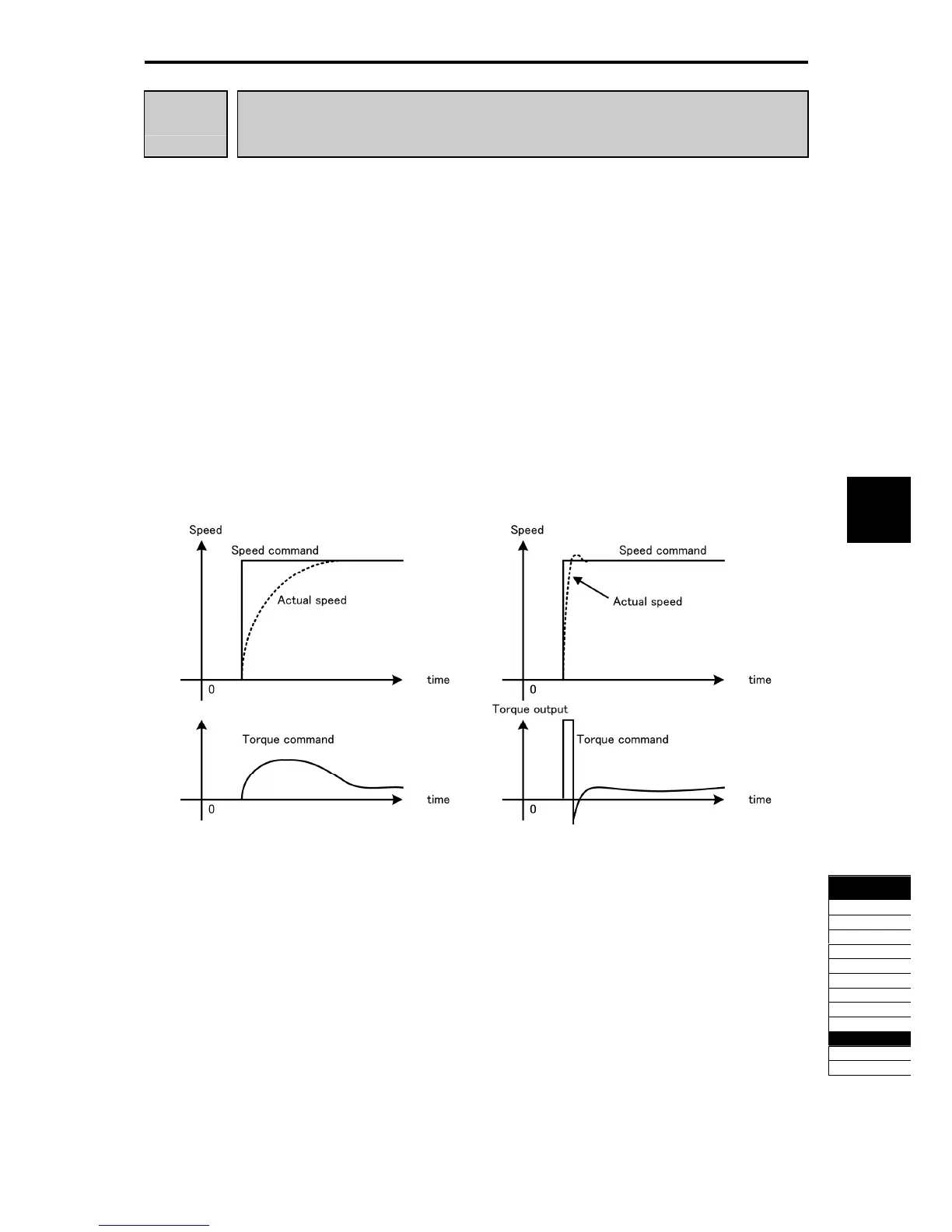
It is valid when the load inertia is known in advance. Conceptually, as shown in the following figures, the
following speeds to the actual command value are completely different when the feed forward control is valid
and invalid. However, in order to maximize the effect of the control, it is necessary to adjust the feedback
control PI constant and this setting to a good balance.
Fig. 5.4-119
Above effect can be acquired also by setting the P gain of the speed controller at a high value. However,
when the gain is set high, the system response increases its speed. Therefore, the negative effects
(mechanical resonance and vibration) also appear.

 Loading...
Loading...








