285
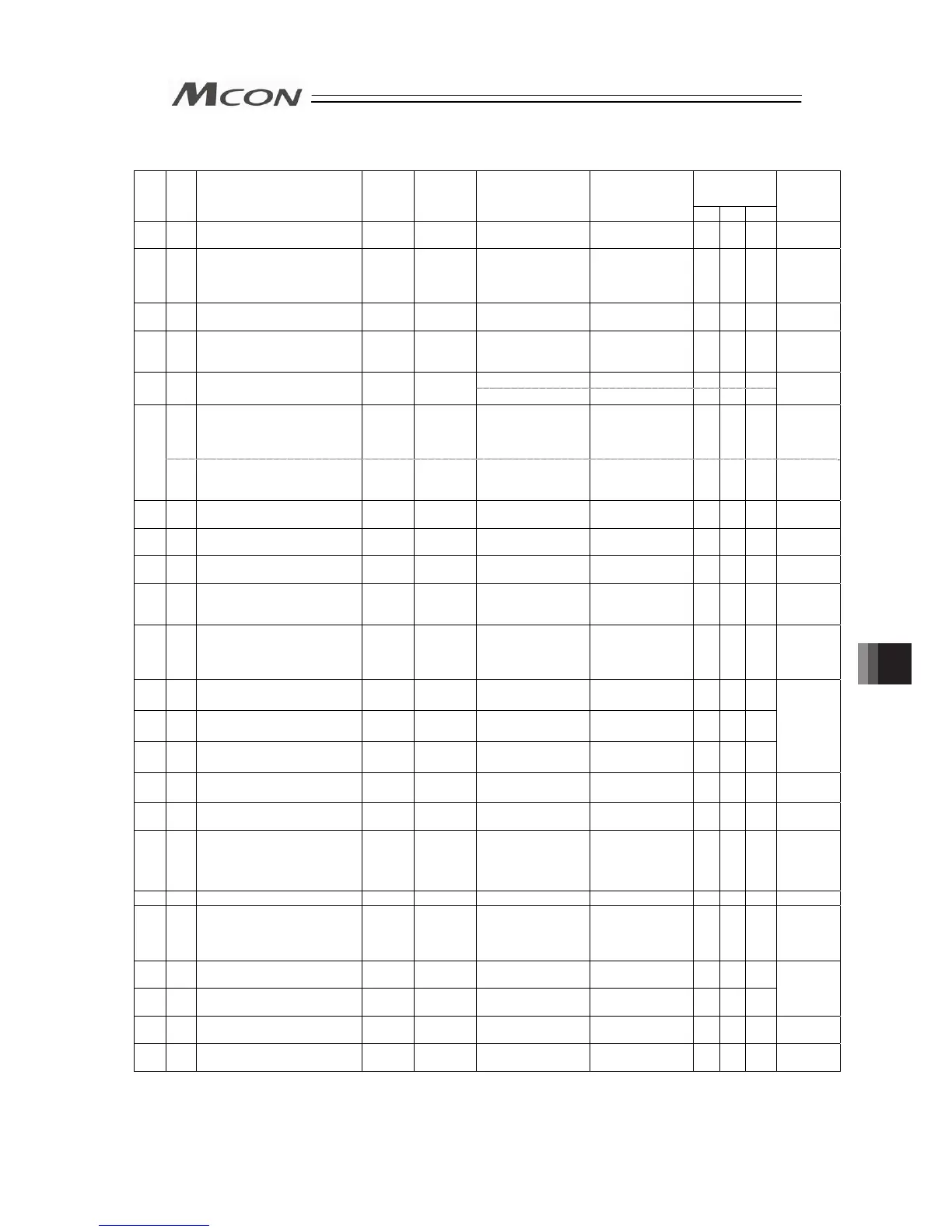
Parameter List (2/5)
Applicable
Motor Type
(Note 3)
No.
Category
Name Symbol Unit
(Note 1)
Input Range
Default factory
setting
A P D
Relevant
sections
25 A PIO Pattern Selection IOPN - 0 to 2, 4 to 6 6 ○ ○ ○
8.2 [16]
3.4.10
26 B PIO Jog Velocity JOGV
mm/s
[deg/s]
1 to 250
(maximum speed
for the actuators
with 250 or less)
In accordance with
actuator
(Note 2)
○
○ ○ 8.2 [17]
27 B Movement Command Type MCT -
0 : Level
1 : Edge
0 ○ ○ ○ 8.2 [18]
28 B
Default movement direction
for excitation-phase signal
detecting movement
PHSP -
0: Reverse
1: Forward
In accordance
with actuator
(Note 2)
○
○ - 8.2 [19]
1 to 999 10 - ○ -
29 B
Exicitation-phase signal
detection time
PHSP msec
50 to 999 128 ○ - -
8.2 [20]
B Excitation detection type PHSP -
0: Conventional
method
1: New method 1
2: New method 2
1 - ○ - 8.2 [21]
30
B Pole Sensing Type PHSP -
0: Current Control
1:
Distance Control 1
2:
Distance Control 2
1 ○ - - 8.2 [22]
31 B
Velocity Loop Proportional
Gain
VLPG - 1 to 27661
In accordance
with actuator
(Note 2)
○
○ ○
8.2 [23]
8.3
32 B Velocity Loop Integral Gain VLPT - 1 to 217270
In accordance
with actuator
(Note 2)
○
○ ○
8.2 [24]
8.3
33 C Torque Filter Time Constant TRQF - 0 to 2500
In accordance
with actuator
(Note 2)
○
○ ○
8.2 [25]
8.3
34 C Push Velocity PSHV
mm/s
[deg/s]
1 to actuator’s
max. pressing
speed
In accordance
with actuator
(Note 2)
○
○ ○ 8.2 [26
35 C Safety Velocity SAFV
mm/s
[deg/s]
1 to 250
(maximum speed
for the actuators
with 250 or less)
100 ○
○ ○ 8.2 [27]
36 C
Auto Servo-motor OFF
Delay Time 1
ASO1 sec 0 to 9999 0 ○ ○ ○
37 C
Auto Servo-motor OFF
Delay Time 2
ASO2 sec 0 to 9999 0 ○ ○ ○
38 B
Auto Servo-motor OFF
Delay Time 3
ASO3 sec 0 to 9999 0 ○ ○ -
8.2 [28]
6.1.1
39 B
Position Complete Signal
Output Method
(Note 3)
PEND -
0: PEND
1: INP
0 ○
○ ○
8.2 [29]
6.1.3
40 C Home-return Input Disable HOME -
0: Enabled
1: Disabled
0 ○ ○ ○ 8.2 [30]
43 B
Home position check sensor
input polarity
HMC -
0:
Sensor not
used
1: a contact
2: b contact
In accordance
with actuator
(Note 2)
○
○ - 8.2 [31]
46 B Velocity override OVRD % 0 to 100 100 ○ ○ ○ 8.2 [32]
47 B PIO Jog Velocity 2 IOV2
mm/s
[deg/s]
1 to 250
(maximum speed
for the actuators
with 250 or less)
In accordance with
actuator
(Note 2)
○
○ ○ 8.2 [33]
48 B PIO Inching Distance IOID
mm
[deg/s]
0.01 to 1.00 1.00 ○ ○ ○
49 B PIO Inching Distance 2 IOD2
mm
[deg/s]
0.01 to 1.00 0.10 ○ ○ ○
8.2 [34]
50 C
Load Output Judgment Time
Period
LDWT msec 0 to 9999 255 - ○ - 8.2 [35]
51 B Torque inspected range TRQZ -
0: Enabled
1: Disabled
0 - ○ - 8.2 [36]
Note 1 The unit [deg] is for rotary actuator and lever type gripper. It is displayed in [mm] in the teaching tools.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipment, the
parameters are set in accordance with the specification.
Note 3
A: Servo motor type, P: Pulse motor type, D: Brushless DC Motor
Chapter 8 Parameter