337
Alarm
Code
Alarm
Level
Alarm Name Cause/Treatment
0A2 Position data error
Cause : 1) A move command was input when no target
position was set in the “Position” field of a
position No. in the position table.
2) The value of the target value in the “Position”
field exceeded the Parameter No.3 and 4 “Soft
limit set value”.
3) A 1 was set to “Incremental” column in the
solenoid valve mode 2 of PIO pattern 5.
4) Pressing operation was specified while the
vibration suppress control function remained
effective.
Treatment : 1) Set the target position.
2) Change the target position value to the one
within the soft limit set value.
3) The target position cannot be set by relative
coordinate (incremental feed).
4) The vibration suppress control function and
pressing operation cannot be used concurrently.
Provide setting so that either of the functions is
effective.
0A3 Position command data
error
Cause : 1) The command value during direct numeric
specification exceeded the maximum set value.
2) Pressing operation was specified in the field bus
specification while the vibration suppress
function remained effective.
Treatment : 1) Exceeded command item code is displayed in
the detailed address. Input an appropriate value
by referring to these values.
Detailed Address
(Command Item Code)
Command Item
0 Target Position
2 Command Speed
4 Acceleration
6 Deceleration
8 Positioning Width
C
Pressing Current Limit
Value
D Control Signal
2) The vibration suppress control function and pressing
operation cannot be used concurrently. Provide
setting so that either of the functions is effective.
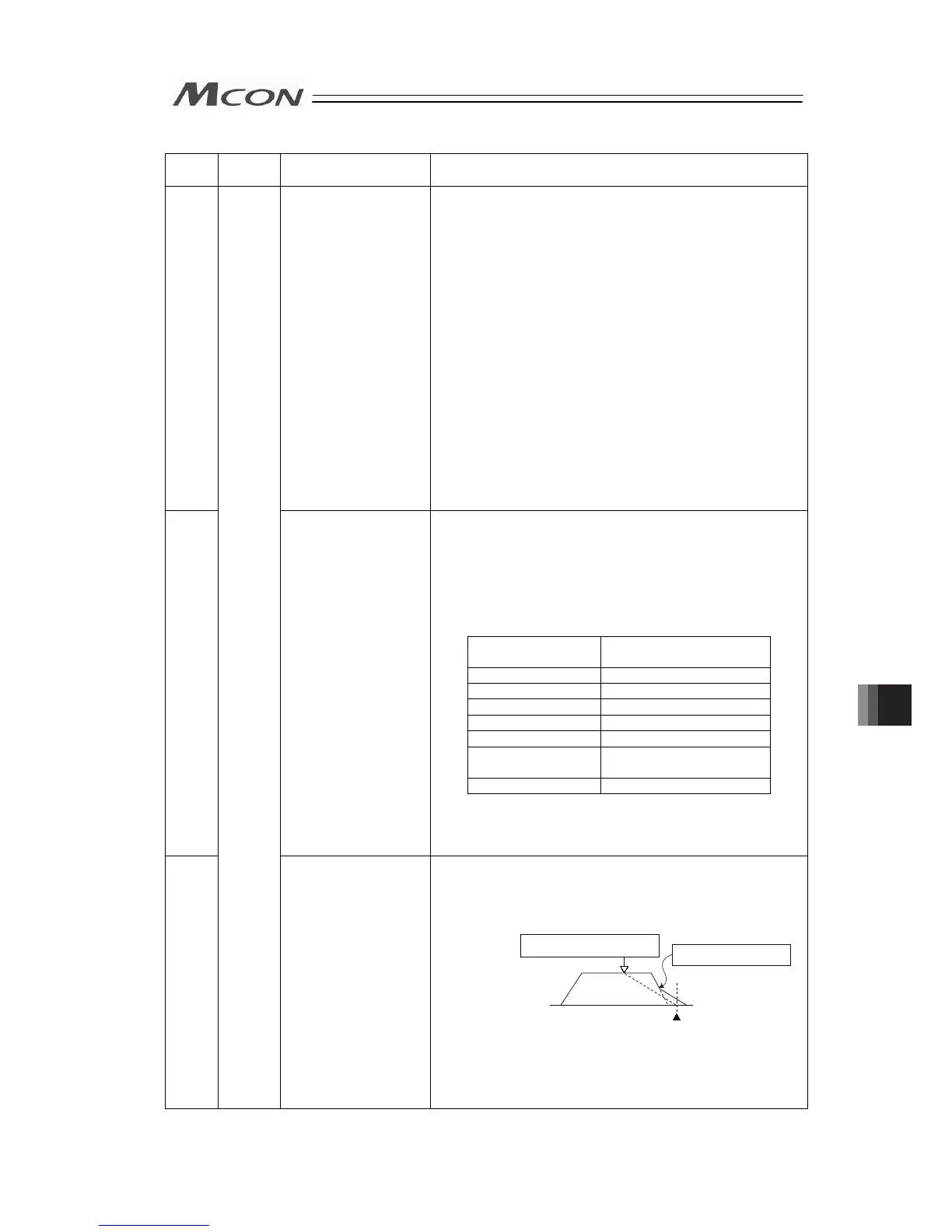
0A7
Operation
release
Command deceleration
error
Cause : Because there is not enough deceleration distance
when the deceleration is changed to a lower setting
during the operation, the actuator exceeded the soft
limit when deceleration was made from the current
position with the deceleration after the change.
Soft limit
Deceleration starting position
not resulting in soft limit overshoot
If a command is issued here,
soft limit overshoot will occur.
The cause is that the timing to make the next
movement command when the speed was changed
during the operation was late.
Treatment : Make the timing earlier for the movement command
for the deceleration speed change.
Chapter 9 Troubleshooting
 Loading...
Loading...









