Scala | V7 | Appendix
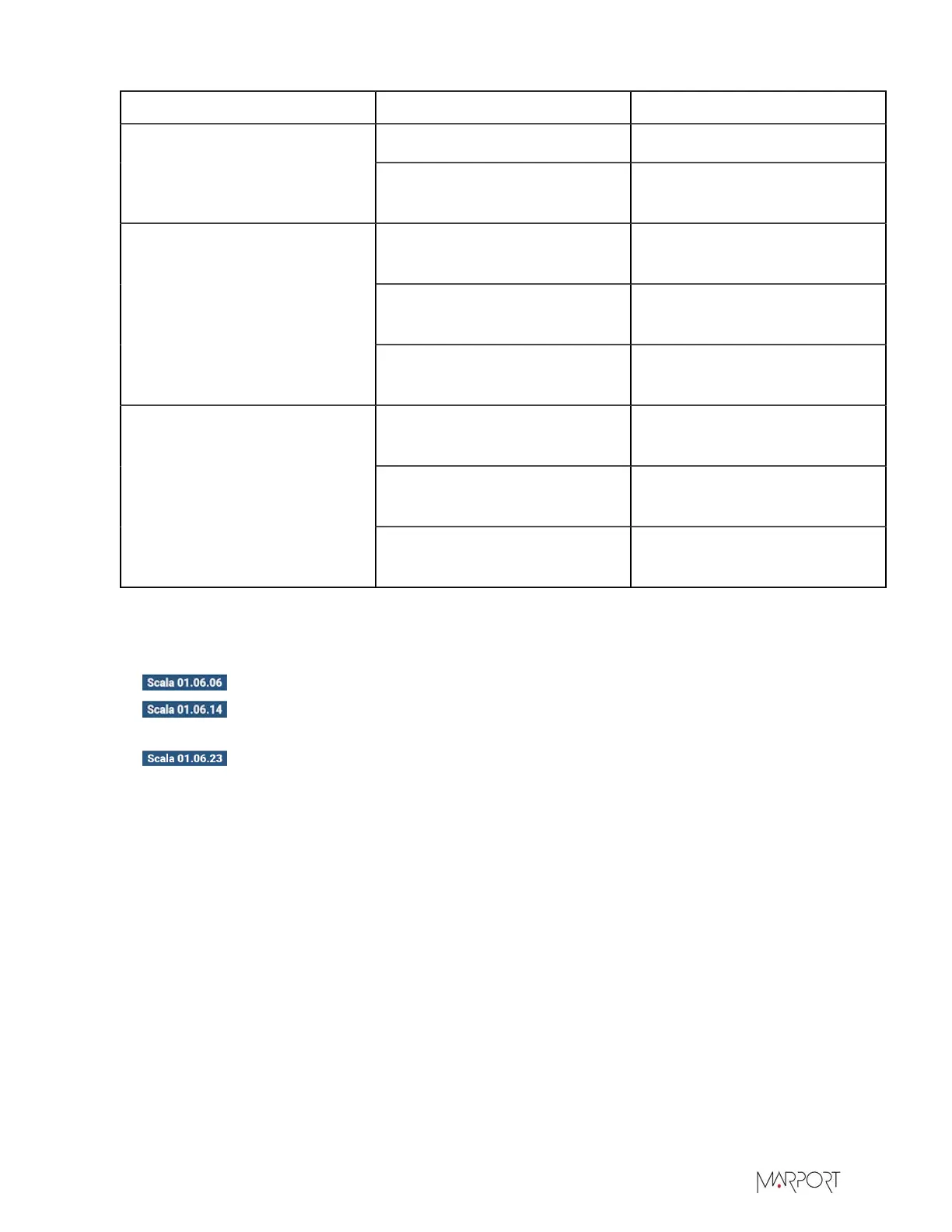
Type of gear X, YY, ZZZ, TTT
P,PD,23,XST Distance between doorsTwin trawl (the master is on
the port door)
P,PD,23,XCL Distance between port door and
clump
P,PD,23,XST Distance between port door and
starboard clump
P,PD,23,XCL Distance between port door and
port clump
Triple trawl (the masters are on
the port doors)
S,SD,223,XST Distance between starboard
door and starboard clump
P,SD,78,XST Distance between port clump
and starboard door
P,SD,78,XCL Distance between port clump
and starboard clump
Triple trawl with port (the
master is on the port clump)
P,SD,78,XPT Distance between port clump
and port door
Positioning sentences
Scala can output NMEA data for trawl door positioning with the following sentences:
•
and later: $PSIMS (Olex), $PTSAL (MaxSea version 12), $PMPT (TimeZero)
•
and later: adding $IIGLL (MaxSea version 12, single position sentence), $IITPT
(Simrad)
•
and later: adding $PTSAL (SeaPix)
These are examples of PSMIS, PTSAL and IITPT sentences:
$PSIMSn,xxxx,M,xxxx,M,yyy.y,T,xxx.x,M,hhmmss*hh<cr><lf>
•
$PSIMS: talker identifier + sentence formatter
•
n: 1 = Spread1 (port trawl door when Twin Rig) / 2 = Spread2 (starboard trawl door when Twin
Rig).
•
xxx,M: slant range to sensor, in meters (filtered values, no decimals).
•
xxx,M: horizontal range to sensor, in meters (unfiltered values, no decimals). Transmits null
fields if depth-sensor is not activated (will calculate horizontal range with manual set depth).
•
yyy.y,T: true bearing (deg.rel.north) to sensor. Requires gyro input for reliable data.
•
xxx.x,M: spread measurement in meters (door to door or door to clump). Transmits null fields if
invalid values. Filtered values if sensor's filter is on.
•
hhmmss: time of transmission (time of Spread interrogation). Requires ZDA input from GPS for
accurate timestamp.
•
*hh: checksum
| 143
 Loading...
Loading...