6.1 PROFINET communication
99
NSOLL_A: set speed A(16Bit), N2.
Servo parameter P310 is used as the reference variable, and the speed instruction value
corresponding to N2 normalized data sent by PLC is used as the speed instruction of the servo
driver. See Section 6.1.4 for details.
NSOLL_B: set speed B(32Bit), N4.
Servo parameter P310 is used as the benchmark variable, and the speed instruction value
corresponding to N4 type normalized data sent by PLC is used as the speed instruction of the
servo driver. See Section 6.1.4 for details.
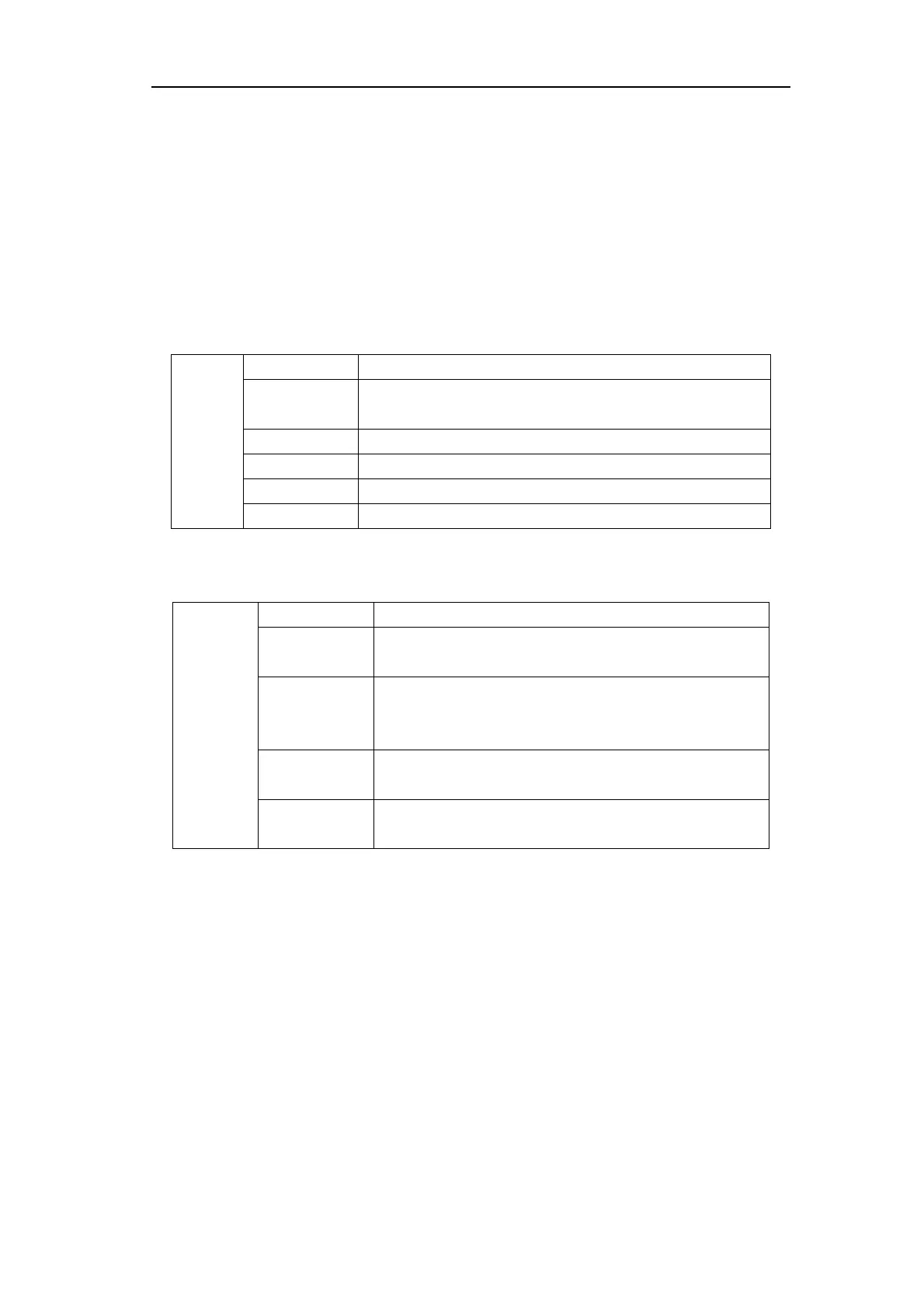
STW2: Control word 2, U16.
STW2
Signal Describe
STW2.0~
STW2.11
Reserved
STW2.12 Main life symbol, Bit0
STW2.13 Main life symbol, Bit1
STW2.14 Main life symbol, Bit2
STW2.15 Main life symbol, Bit3
G1_STW: Encoder 1 control word, U16.
G1_STW
Signal Describe
G1_STW.0~
G1_STW.11
Reserved
G1_STW.13
1: Request the additional cycle cycle transmission for the
absolute position in Gx_XIST2.
0: No request.
G1_STW.14
1: Requests the resident shaft encoder.
0: No request.
G1_STW.15
1: Encoder fault confirmation (0→1 hop).
0: Indicates nonsense.
MOMRED: Torque reduction set point, N2.
Servo parameter P312 is used as the reference variable. The torque reduction instruction
corresponding to N2 type normalized data sent by PLC takes effect after recalculating the
positive and negative torque limit value inside the servo. For details, see Section 6.1.4.
XERR: DSC position deviation, I32.
KPC: DSC position control gain, I32.