6.1 PROFINET communication
105
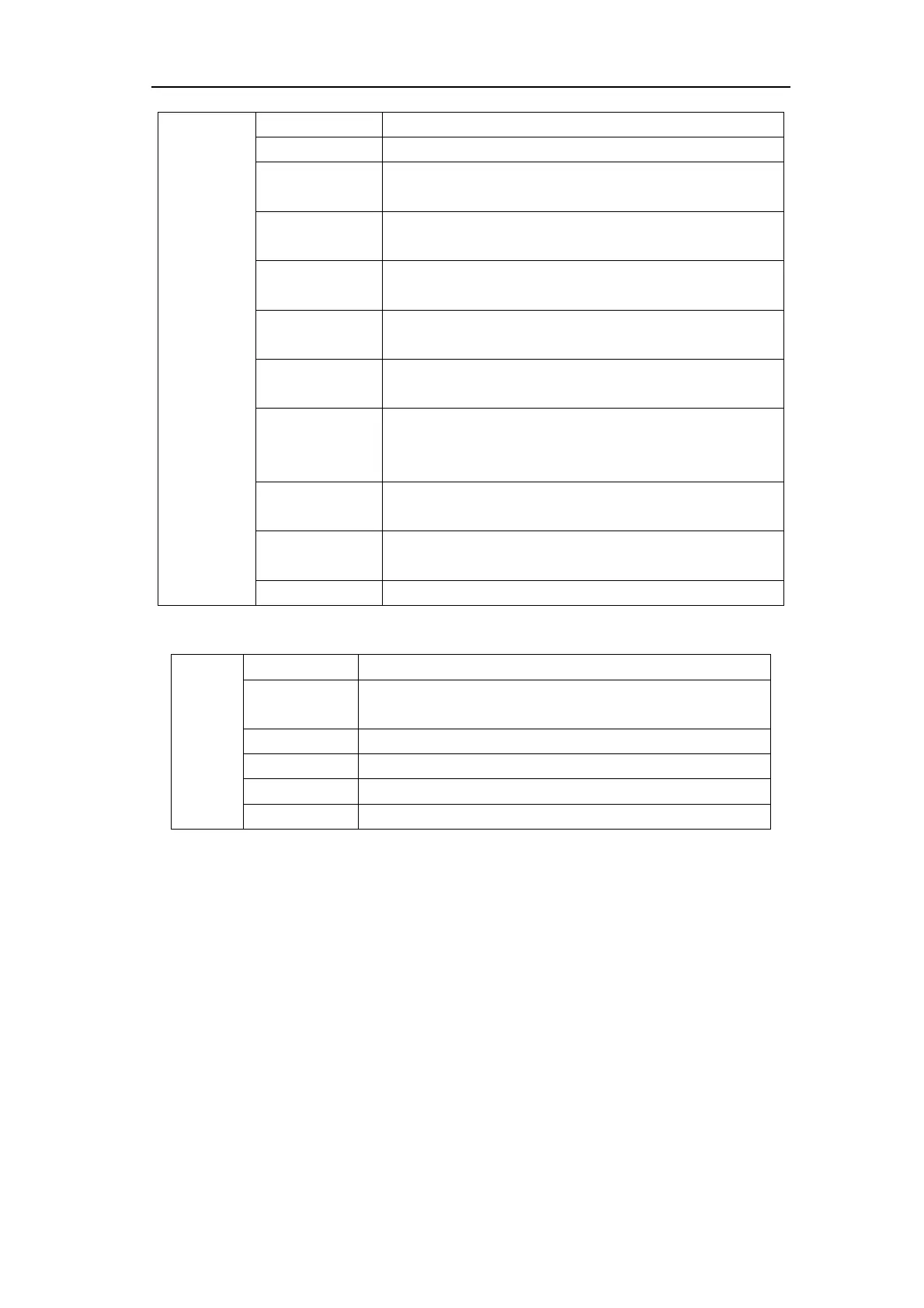
POS_STW2: POS control word 2, U16.
POS_STW2
Signal Describe
POS_STW2.0 Reserved
POS_STW2.1
1: Sets the reference point.
0: The reference point is not set.
POS_STW2.2
1: The reference point block is activated.
0: The reference block is not activated.
POS_STW2.3~
POS_STW2.4
Reserved
POS_STW2.5
1: JOG incremental mode.
0: JOG speed mode.
POS_STW2.6~
POS_STW2.8
Reserved
POS_STW2.9
1: Start searching for reference points in the negative
direction.
0: Searches for a reference point in the positive direction.
POS_STW2.10~
POS_STW2.13
Reserved
POS_STW2.14
1: Soft limit activation.
0: The soft limit is not activated.
POS_STW2.15 Reserved
STW2: Control word 2, U16.
STW2
Signal Describe
STW2.0~
STW2.11
Reserved
STW2.12 Main life symbol, Bit0
STW2.13 Main life symbol, Bit1
STW2.14 Main life symbol, Bit2
STW2.15 Main life symbol, Bit3
OVERRIDE: position velocity multiplier (16Bit), N2.
MDI_VELOCITY is used as the reference variable, and the proportional value
corresponding to the N2 type normalized data sent by PLC is used as the multiplier of the
MDI_VELOCITY velocity instruction. For details, see Section 6.1.4 (4000hex = 100%).
MDI_TARPOS: MDI position, I32.
The position instruction data sent by PLC is input as the position instruction of the servo
driver position planning. For details, see section 6.4.3 (1hex = 1LU).