Chapter 6 Communication function
120
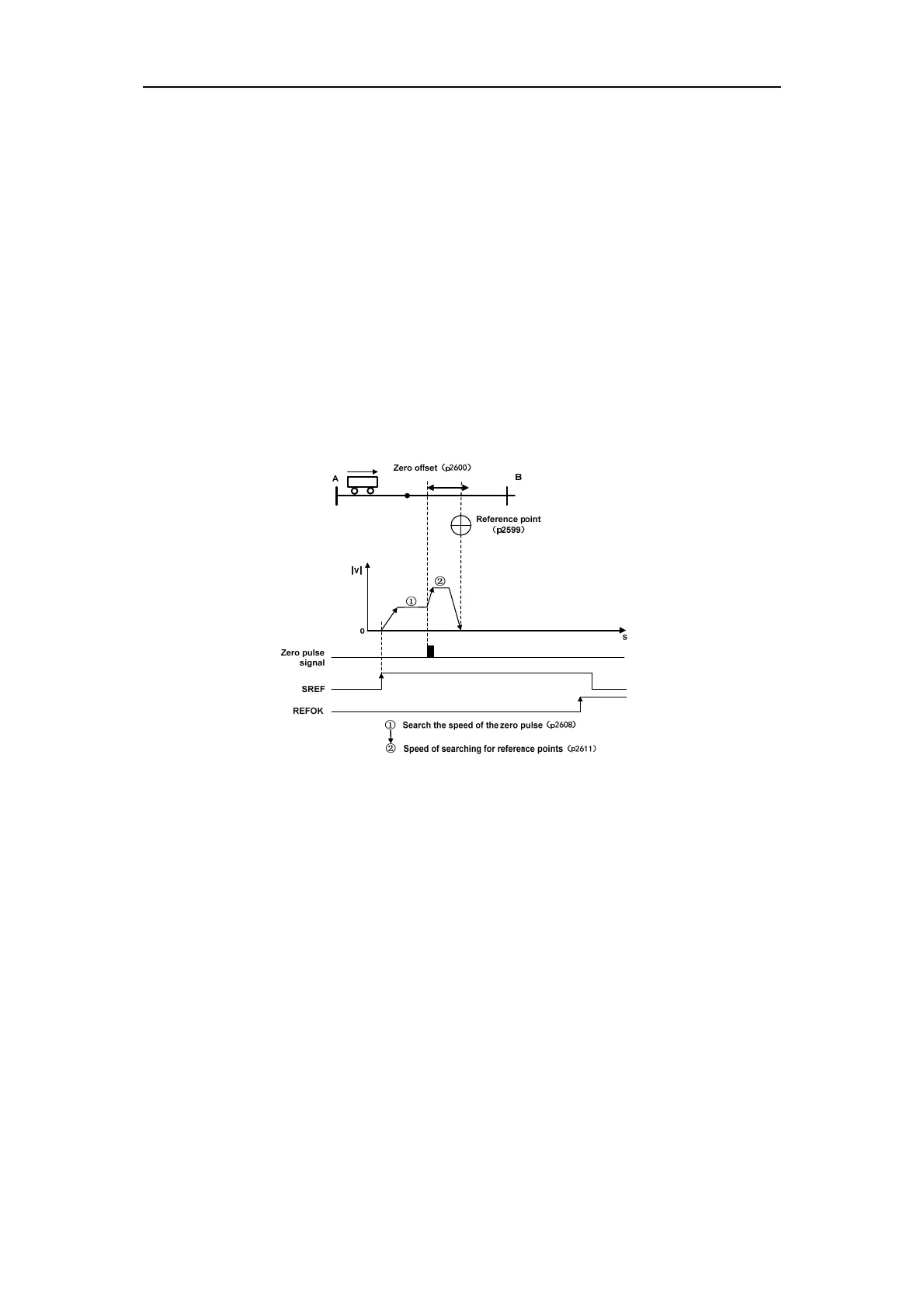
Encoder only zero pulse (Mode 2)
In this mode, the REF signal is not available and the return to the reference point process
is triggered by STW1.11(0->1). The servo drive is accelerated to the speed specified by the
parameter "return to reference search zero speed", and the running direction is specified by the
parameter "return to reference direction"; When the first zero pulse is reached, the servo drive
begins to run towards the reference point defined by the parameter "back reference offset
value" at the speed specified by the parameter "back reference point approaching reference
point speed"; When the servo drive reaches the reference point, the REFOK signal is output.
Setting STW1.11 to 0 succeeds in returning to the reference point.
The whole process is shown as follows. The parameter "maximum distance back to the
reference point zero" sets the travel of path 1 in the figure to search for zero. No zero pulse
signal is found in the travel, and the servo driver generates an Err78 alarm.
In the process of returning to the reference point, acceleration and deceleration are carried
out with maximum acceleration and maximum deceleration.